

Abridged version
1 Introduction
The water bottom and its near subsurface are by nature 3-dimensional structures and should be treated as such, which excludes 2D approximations.
From the imagery point of view, the main key constraints for a survey design are the following: maximum depth and dip of layers, horizontal and vertical resolution. These constraints may, in turn, be related to the acquisition geometry addressing the following parameters: signal frequency bandwidth, trace length, trace interval, streamer length, streamer spacing, line spacing and shot interval.
The proposed 3D acquisition system (Fig. 1) was designed for the optimal coverage of sites of limited extent (2 km × 1 km) in water depths up to 100 m and a target vertical resolution of 1 m. Investigation areas might include large geotechnical sites (dams, artificial island sites, pipeline routes on the continental shelf…) or sedimentary bodies of geological key importance.
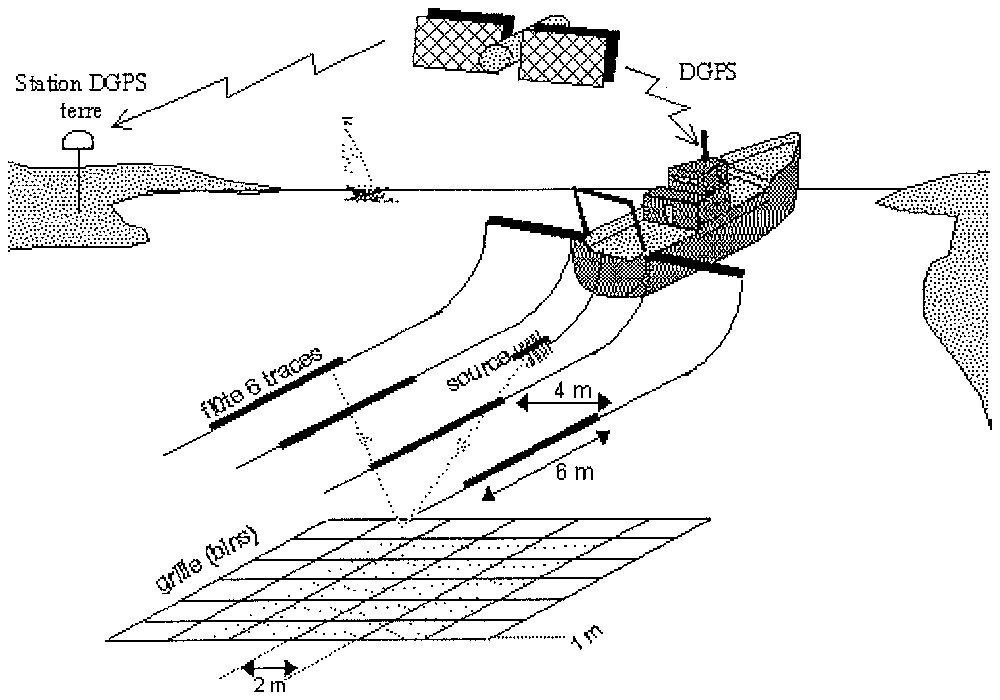
Dispositif d'acquisition sismique THR 3D, composé d'une source et de quatre flûtes, assurant une couverture théorique de maillage 2 m × 1 m.
Schematic overview of the proposed VHR 3D acquisition device.
2 Methodology
The term ‘Very High Resolution’ (VHR) seismic stands for a resolution of submetric scale in the medium; yet, seismic sources are to provide with adequate frequency content: sparker technology appears to be the most suitable answer to the needs of the project, yet leading to a frequency bandwidth centred on 700 Hz.
The success of any water-borne VHR 3D seismic method depends on a highly accurate positioning of seismic source and receivers. The approach is two-sided:
- • absolute positioning, i.e., with reference to an ellipsoid;
- • relative positioning, i.e., source–receiver position with respect to each other.
The proposed solution to handle relative positioning is based on numerical inversion of direct/reflected travel time; although this problem is clearly underdetermined, simple assumptions may easily be added to constrain the solution.
In order to design 3D processing sequences, direct modelling was used to compute synthetic seismograms: the pre-stack migration routine, involving an adapted Kirchhoff depth migration, turns to be the most efficient algorithm to handle the irregular acquisition grid.
3 Application
Three geological targets were successfully surveyed within the project:
- • a site in the Mediterranean Sea (1998) – located in the Gulf of Aigues-Mortes (France) – was selected for the existence of a highly contrasted lithology linked to sea level changes since 18 000 BP in a river mouth area (Fig. 2);
- • a site in the Dover Strait (1999) – located off Cape Gris-Nez – was chosen in a tectonised environment where folds and faults affect Jurassic limestones (Fig. 3);
- • a site off the southern coast of Cornwall (2000) – located in St Austell Bay – was chosen with a view to access to existing geotechnical and geophysical data; the location provides an unconsolidated sequence of sands and clays in a fluvial environment, including peat beds and cobbles overlying a consolidated shale (Devonian) substrate (Fig. 4).
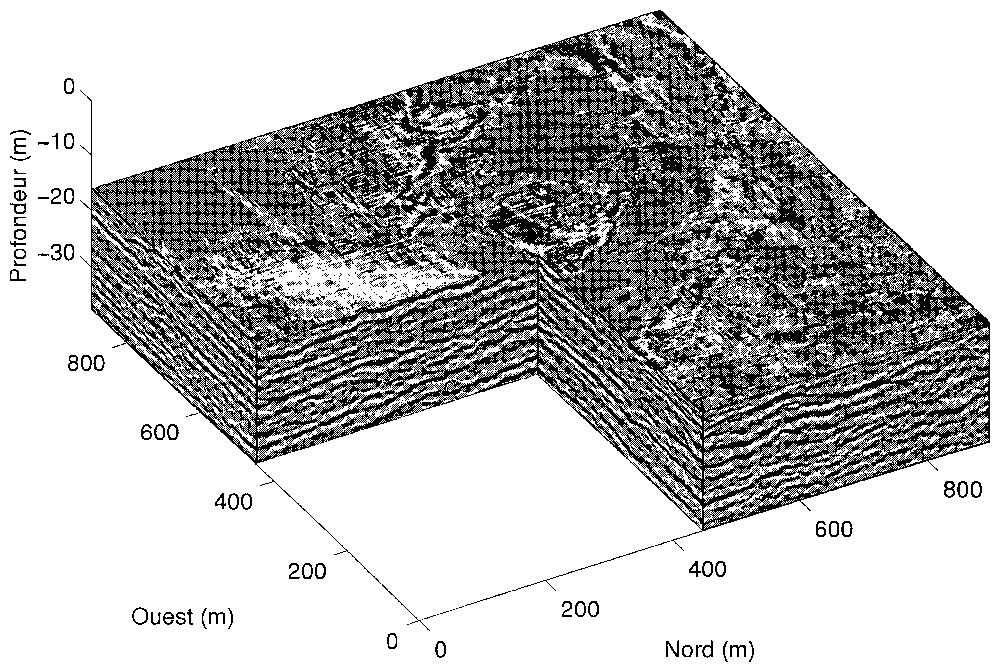
Bloc 3D d'Aigues-Mortes, France, 1998 : zone test visant à « imager» un environnement présentant des lithologies contrastées, soit une alternance de sédiments fins (faciès sismique gris homogène) et de sédiments grossiers (faciès sismique chaotique).
3D block of the Gulf of Aigues-Mortes, France, 1998: VHR 3D data set, collected in the Mediterranean Sea, displaying highly contrasted lithology made of fine-grained sediments (homogeneous grey seismic facies) alterning with coarse-grained sediments (chaotic seismic facies).
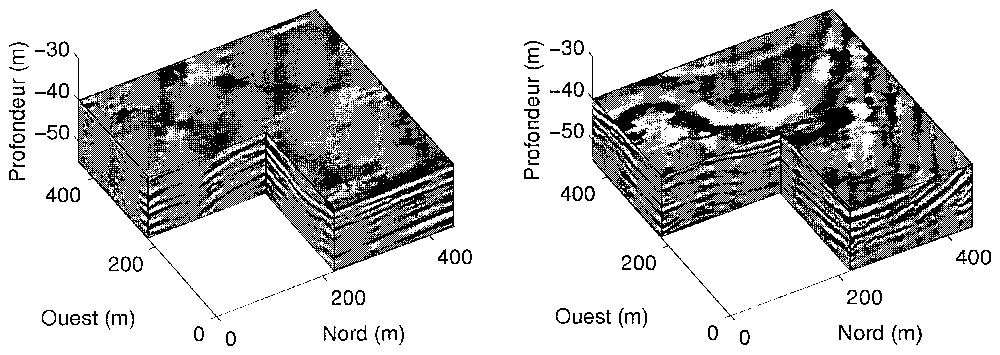
Bloc 3D du Boulonnais, France, 1999 : zone test visant à « imager» des structures lithologiques dans une série carbonatée. L'exemple montre une faille accompagnée d'un épanchement de gaz à faciès sismique sourd (cube de gauche) et le passage d'un anticlinal à un synclinal (cube de droite).
3D block of the Boulonnais, France, 1999: VHR 3D dataset, collected in the Dover Strait, underlying lithological features in carbonate sets. The left block shows a fault and the presence of gas, the right one shows the transition from anticline to syncline shape.

Bloc 3D de Saint Austell, Angleterre, 2000 : zone test visant à « imager» un réseau de paléo-vallées, avec mise en évidence d'une zone de confluence (à gauche). L'image montre l'évolution typique du faciès de remplissage de paléo-vallée depuis la base (faciès chaotique lié à la présence de sédiments grossiers) jusqu'au sommet (transparent lié à la présence de sédiments fins argileux).
3D block of the St Austell Bay, England, 2000: VHR 3D dataset, collected off the southern coast of Cornwall, imaging a network of paleo-valleys. Note, on the left, the confluence of two valleys. The filling of paleo-valleys is characterised, from bottom to top, by chaotic seismic facies evolving to low energy seismic facies suggesting an evolution from coarse-grained to fine-grained sediments.
4 Conclusion
The approach presented here has allowed to successfully downscale 3D seismic surveying for VHR studies; nevertheless the method is limited to targets of limited extent. A new project was started in January 2001 to develop affordable 3D seismic adapted to HR studies.
1 Introduction
Tant du point de vue du géophysicien (acquisition, traitement) que de celui du géologue (interprétation), la réalité physique du terrain est éminemment tridimensionnelle. L'objectif du développement d'une méthode de reconnaissance sismique très haute résolution (THR) 3D est de prendre en compte cette réalité de terrain, l'échelle abordée étant l'échelle de la reconnaissance de détail (quelques kilomètres carrés).
Dans l'acquisition de profils sismiques 2D, les événements provenant hors du plan d'acquisition sont interprétés comme du bruit (échos latéraux). Dans le cas 3D, tous les événements sismiques enregistrés correspondent à un signal qui doit permettre d' « imager » correctement les structures ; les signaux provenant hors du plan d'acquisition peuvent être focalisés et contribuent ainsi à améliorer la résolution des images sismiques. L'acquisition de profils sériés 2D est couramment employée pour réaliser une interprétation pseudo 3D ; néanmoins, l'espacement des profils entraı̂ne une grande disparité de l'échantillonnage spatial et l'interprétation 3D de ces données s'en trouve biaisée, voire impossible.
Le premier intérêt des données sismiques 3D est de fournir par imagerie un volume sismique permettant l'interprétation 3D des structures et des couches sédimentaires à l'aide d'outils interactifs de piqué d'événements. L'exploitation des volumes de sismique 3D conventionnelle (pétrolière) ne se limite pas à ce premier stade d'interprétation et permet la construction de réels modèles numériques de terrain, à travers le calcul d'attributs sismiques sur le volume sismique traité et leur corrélation avec des données issues de mesures in situ. Néanmoins, les contraintes d'acquisition et de traitement deviennent alors telles, qu'elles ne sont pas transposables aux études de sols superficiels.
Le développement d'une méthode de reconnaissance sismique 3D THR opérationnelle en terme d'acquisition et de traitement prend la suite des approches menées par différents laboratoires durant la dernière décennie [1,5,10].
2 Dispositif
Le dispositif expérimental est présenté sur la Fig. 1.
La gamme de fréquence imposée par les objectifs de résolution (métrique dans le cas de la sismique THR) détermine en grande partie la géométrie du dispositif d'acquisition, et principalement la distance maximale entre deux récepteurs. L'échantillonnage spatial du front d'onde réfléchi, qui est fonction de la géométrie des réflecteurs (pendage), doit satisfaire à certains critères, afin de permettre une bonne focalisation des événements sismiques lors du traitement, focalisation sans laquelle ces événements se traduiront par un bruit dispersif dans le volume de données traitées. Ce point doit être pris en compte pour la définition de la distance entre traces (in-line spacing), mais aussi pour la définition de la distance entre flûtes (cross-line spacing). Le Tableau 1 présente les résultats du calcul des distances inter-capteurs en fonction des pendages des réflecteurs à imager dans le cas de l'utilisation d'une source sismique THR (fréquence centrale 600 Hz).
Distances inter-capteurs requises pour « imager» différents pendages (cas de la sismique très haute résolution, fréquence centrale : 600 Hz).
Distance between receivers for imaging different slopes (case of Very High Resolution seismics, central frequency: 600 Hz).
| Pendage des réflecteurs | 10° | 20° | 40° | 60° | 90° |
| Distance inter-capteurs (m) | 7,00 | 3,50 | 2,00 | 1,50 | 1,25 |
Enfin, la définition d'une méthode d'acquisition doit prendre en compte les contraintes opérationnelles en termes de moyens, les reconnaissances sismiques en milieu peu profond (inférieur à la centaine de mètres) s'effectuant, de manière générale, à l'aide de navires polyvalents de petite taille.
Le dispositif développé s'est fixé pour objectif de permettre d'imager des pendages de 40° dans l'axe d'acquisition (soit une inter-trace de 2 m) et des pendages de 20° dans l'axe perpendiculaire (soit un inter-flûte de 4 m). La longueur des flûtes a été limitée à six traces, afin de conserver une taille de dispositif d'une bonne facilité de mise en œuvre. Les flûtes sont opérées, soit à partir de tangons, soit à partir de panneaux divergents souples, afin de pouvoir accroı̂tre leur espacement dans le cas de l'étude de structures présentant de faibles pendages. Un tel dispositif ne permet pas de réaliser les analyses de la vitesse de propagation des ondes dans le sol, du fait de sa faible longueur : les analyses de vitesse sont réalisées parallèlement à l'acquisition 3D, de manière conventionnelle, par le biais d'études 2D à plus grand offset (distance source–récepteur).
Le positionnement de l'ensemble du dispositif est le point le plus critique de l'acquisition, ce positionnement devant permettre de localiser, à l'échelle de la résolution souhaitée (métrique), la source sismique et les récepteurs, afin de permettre le traitement des données. Le positionnement absolu (référencé à un ellipsoı̈de) est réalisé à l'aide d'un récepteur GPS fonctionnant en mode différentiel sur une station de référence dédiée. Les corrections en temps réel permettent le suivi de profil, tandis que le traitement en temps différé des données de la station de référence et du navire permettent le positionnement de l'antenne de réception à la précision souhaitée. Les corrections en altitude sont obtenues à partir des données d'un profondimètre, corrigées des variations de pression atmosphérique.
3 Acquisition
La géométrie du dispositif, une fois déterminée, fixe les paramètres d'acquisition en termes de cellules élémentaires imagées (bin). Les dimensions optimales de cette cellule élémentaire sont égales à la moitié de la distance entre capteurs, cette taille étant dégradée (augmentée) si la vitesse du navire ne permet pas une cadence de tirs suffisamment rapide (égale à la demi-intertrace). La taille du dispositif proposé (quatre flûtes sismiques, espacées de 4 m, comportant chacune six traces espacées de 2 m), associée à un inter-tir de 1 m, donne accès à un bin théorique de 1 m (in-line) par 2 m (cross-line). La surface totale insonifiée pour chaque point de tir est alors de 6 m (in-line) par 6 m (cross-line) ; une couverture complète de la zone prospectée nécessitera la réalisation de lignes d'acquisition distantes de 8 m. En prenant en compte une vitesse moyenne du navire de 4 nœuds (une ligne naviguée de 1 km en 10 min), ainsi que le temps nécessaire à la présentation sur les profils (10 min), l'acquisition d'une surface de 1 km2 peut être évaluée à 48 h, durée qui peut être majorée à 4 j afin de prendre en compte les différents impondérables.
L'acquisition proposée reste une stratégie d'acquisition : le système de positionnement utilisé ne dispose pas d'une précision suffisante en temps réel, les positions exactes de la source et des récepteurs ne sont pas connues et la trajectoire du navire peut s'éloigner des lignes théoriques. L'objectif essentiel de l'acquisition est de fournir une couverture aussi complète que possible nécessitant ainsi la réalisation de profils supplémentaires (infill), afin d'homogénéiser celle-ci.
4 Traitement
Le traitement de données de sismique 3D, quelles qu'elles soient, reste avant tout un problème de positionnement : positionnement absolu, mais aussi positionnement relatif : antenne, source et récepteurs sismiques. La sommation des traces sismiques issues de profils différents ne peut être cohérente que si l'ensemble des positions est connu avec une précision inférieure à la résolution recherchée.
Le traitement temps différé, par trajectographie, des données de GPS différentiel donne accès à une résolution supérieure au mètre pour la position de l'antenne. Les positions relatives (X,Y) de la source et des récepteurs sismiques sont calculées à partir des temps de trajet direct dans l'eau ; cette approche représente un problème sous-déterminé, qui doit être contraint, moyennant certaines hypothèses sur le comportement du dispositif. Les positions absolues de la source et des récepteurs sismiques sont obtenues par projection de leurs positions relatives dans l'axe du navire. Les standards utilisés dans l'acquisition sismique 3D pétrolière (positionnement UHF et acoustique) ne sont pas adaptés aux études des sols superficiels en termes de coût et d'encombrement. La chaı̂ne de traitement proposée permet une connaissance approchée des coordonnées des différents capteurs sismiques.
L'utilisation de sources sismiques très haute résolution de type Sparker ou Boomer (fréquence centrale supérieure à 600 Hz) ne permet pas d'obtenir une bonne reproductibilité du signal, du fait de leurs largeurs de bande et des variations d'immersion liées aux techniques de mise en œuvre. En conséquence, le traitement des données sismiques ne s'intéresse pas aux amplitudes vraies et le pré-traitement des données se limite à une séquence simple : réjection des traces bruitées/filtrage fréquentiel – détection du fonds – suppression de l'arrivée directe – normalisation d'amplitude – filtrage de la houle [7].
Deux séquences de traitement conventionnel s'offrent ensuite, afin de calculer l'image 3D finale (cube) [8].
- • Un traitement de type « point milieu commun » (CMP), qui consiste à corriger les différentes traces de leur offset en utilisant une loi de vitesse (Normal Move Out), puis à sommer les différentes contributions (stack) au sein d'un même bin. Cette séquence présente l'avantage de la simplicité ; néanmoins, elle ne prend pas en compte, dans la sommation, la position exacte du point milieu mais celle du bin ; de plus, ce type de traitement repose sur l'hypothèse de réflecteurs horizontaux, hypothèse inadaptée par définition à l'étude de structures 3D.
- • Un traitement de type migration de Kirchhoff, qui consiste, à partir d'une loi de vitesse donnée, à calculer la contribution de chaque point de tir à la construction de traces migrées centrées sur les différents bins. Cette séquence est plus coûteuse en matière de calcul ; néanmoins, elle prend en compte la position réelle des traces enregistrées et des traces migrées, et ne fait pas d'hypothèses sur la géométrie du milieu. L'implémentation d'une version simplifiée du code de migration, justifiée par le manque de contrôle sur les amplitudes et par l'utilisation de modèles de vitesse 1D, permet d'utiliser efficacement ce traitement dans le cadre de l'imagerie THR 3D.
5 Applications
Au cours du développement de la méthode de reconnaissance sismique THR 3D, trois sites différents ont été reconnus dans des contextes géologiques variés.
5.1 Golfe d'Aigues-Mortes (1998)
Ce sont des unités sédimentaires postglaciaires, déposées durant la dernière remontée du niveau marin (depuis ans) et correspondant à des sédiments littoraux liés à l'activité fluviatile du Petit Rhône [2,4]. Une zone de 1 km sur 1 km a été reconnue en utilisant un écartement entre flûtes de 10 m (ce dispositif entraı̂nant un sous-échantillonnage dans le sens cross-line n'a plus été utilisé par la suite). Une interprétation de profils monotraces, extraits du jeu de données, en parallèle au traitement 3D proprement dit, a permis de valider l'ensemble de la méthode proposée (Fig. 2).
5.2 Boulonnais (1999)
Il s'agit de formations carbonatées tectonisées, datées du Jurassique supérieur, appartenant à la plate-forme épicratonique nord-européenne [6,9]. Une zone de 1,5 km × 0,6 km a été reconnue en utilisant un écartement entre flûtes de 4 m, correspondant au dimensionnement idéal du dispositif. La présence d'événements de grande longueur d'onde (anticlinal, synclinal) et de petite longueur d'onde (faille), tous deux correctement imagés en 3D, souligne l'excellente adéquation de la méthode à ce type de reconnaissance (Fig. 3).
5.3 Baie de Saint Austell, Angleterre (2000)
Ce sont des structures de remplissage d'un réseau complexe de paléo-vallées quaternaires [3]. La définition recherchée sur ces corps sédimentaires de très petite taille (quelques mètres de profondeur, quelques dizaines de mètres d'extension latérale), tend vers la limite de la méthode présentée ; les différentes phases de remplissage des chenaux sont néanmoins bien imagées (Fig. 4).
6 Conclusion
Le développement d'une méthode de reconnaissance des sols superficiels par sismique THR 3D a été mené avec succès. Les moyens mis en œuvre, en termes d'acquisition et de traitement, restent modérés et compatibles avec les objectifs scientifiques et/ou techniques poursuivis. Les résultats, en terme d'imagerie, soulignent l'intérêt de cette méthode, qui offre à l'interprétation des données comparables à un levé de terrain à terre.
L'approche proposée reste néanmoins focalisée sur des zones de détail, du fait de la longueur du dispositif. Le développement d'une méthodologie haute résolution 3D (gamme de fréquence 50–350 Hz) a été commencé en janvier 2001, afin de permettre d'aborder des corps géologiques de plus grande extension géographique.
Remerciements
L'ensemble de ce travail a été réalisé dans le cadre du projet européen MAST3 VHR3D, référence : MAS3-CT97-0121.