

Version française abrégée
Depuis les premières utilisations de la technique GPS pour localiser les animaux sauvages, en 1994, les chercheurs ont testé différentes variables pouvant affecter les performances de ces systèmes, comme l'influence de l'activité animale, l'effet de l'intervalle entre localisations, l'effet de l'équipement sur le comportement de l'animal ou les problèmes d'obstruction, c'est-à-dire l'effet des obstacles tels que la canopée des arbres ou la topographie, qui peuvent limiter considérablement les performances de ce système. La majorité des évaluations de l'effet canopée, de la hauteur et du diamètre des arbres, de la présence de feuilles ou non, de l'accumulation de neige sur les conifères a été réalisée en milieu forestier boréal, à l'exception d'une étude menée en forêt tempérée très ouverte et de nos propres résultats préliminaires. Comme les forêts boréales sont composées d'arbres de plus petite taille que les forêts tempérées, il était nécessaire de pouvoir évaluer les performances de ce système avant de le mettre en œuvre dans ce dernier milieu. Comme l'avait préconisé l'un des pionniers de l'utilisation de cette technique, nous avons réalisé des tests en effectuant des tentatives de localisations lors de parcours dans six types de forêts et dans un milieu ouvert de référence, en transportant les colliers GPS sur nos épaules. Les résultats de ces tests ont ensuite été comparés aux localisations attendues provenant de colliers GPS équipant sept cerfs élaphes dans les mêmes milieux, avec deux intervalles de temps différents entre les localisations et lors des périodes de présence et d'absence de feuilles.
Ce travail a été réalisé dans le Parc national des Cévennes. Les colliers GPS utilisés en mode différentiel lors des tests (douze GPS 6 canaux et neuf GPS 8 canaux) sont du type GPS 1000 (de la firme Lotek). Les sept cerfs étaient équipés de GPS 1000 6 canaux, programmés avec un intervalle entre localisations de 10 ou 180 min.
Les résultats des tests montrent, pour les deux types de colliers, une augmentation des localisations en trois dimensions en milieu ouvert dans les petits conifères et une diminution des localisations recueillies dans les conifères de grande et de très grande taille.
Les GPS 8 canaux ont des performances légèrement supérieures aux 6 canaux.
Il n'y a pas de différence entre les périodes avec et sans feuilles si l'on exclut la période avec accumulation de neige sur les branches. Durant celle-ci, le succès des localisations diminue fortement dans les forêts de conifères mélangés et de conifères de grande et très grande taille.
L'analyse des 18 538 localisations attendues sur les cerfs en liberté montre que, pendant la période sans feuilles, le succès des localisations est plus important que pendant la période avec feuilles. Elle montre également que le nombre de localisations réussies est plus grand avec un intervalle de 10 min entre les localisations qu'avec un intervalle de 180 min, et que la différence de succès de localisation entre la période avec feuilles et sans feuilles est plus importante avec un intervalle long (180 min) qu'avec un intervalle court (10 min).
Des différences variables entre les animaux ont été constatées pour les deux périodes en ce qui concerne le succès de localisation.
Nos résultats confirment donc l'influence de l'obstruction induite par la taille des arbres sur les signaux GPS (plus la taille des arbres augmente, plus le succès de localisation diminue). Ceci implique une sous-estimation potentielle de l'utilisation des milieux comprenant de grands arbres par les animaux.
Bien que, au cours des tests, nous ayons constaté un succès de localisation plus faible en période sans feuilles, nous pensons, au vu des résultats obtenus sur les cerfs en liberté, qu'il s'agit d'un effet plutôt dû à un changement d'habitat au cours de l'année qu'à la seule absence de feuilles.
Le seul article que nous ayons trouvé mentionnant des tests réalisés avec une accumulation de neige sur les branches (en forêt boréale) n'indique aucun effet de cette accumulation sur le succès des localisations. Dans notre cas, cet effet est réel. La différence entre ces deux tests peut provenir, en forêt tempérée, de la superposition des effets de la taille des arbres et de la qualité de la neige. Dans notre cas, la neige était peu froide et humide, ce qui accroît vraisemblablement l'absorption des ondes par rapport à une neige froide et sèche.
Nos résultats prouvent que plus l'intervalle de temps entre localisations est grand et plus le succès de localisation diminue. Il s'agit ici d'un problème lié en grande partie au changement de la constellation de satellites visibles, qui a plus de chances d'être modifiée lorsque l'intervalle de temps est plus long, ce qui entraîne donc une augmentation du temps de recherche.
1 Introduction
Since the first application of the Global Positioning System to locate wild animals [1], researchers have tested the performance of this technique with respect to location accuracy [2–9], influence of animal activities [7,10,11], and effect of sampling interval [6] on location success rate, or the effect of equipment on animal behaviour [12,13]. GPS users must also be concerned with the effect of obstacles such as tree canopy and topography, which may limit the performance of GPS receivers. Most of GPS performance tests as regards obstruction have been conducted in boreal forest [2,3,5,11,14,15]. With one exception, these tests were conducted on stationary GPS receivers in controlled situations. Edenius [3] carried GPS collars along a forest trail at normal walking speed. GPS performance decreases as trees get taller [3,5,14,15] and when canopy closure [2], tree density [2,16] and tree basal area [2,3,14,15] increase. Additionally, GPS performance is better during the leaf-off period [3,4,14,15], whereas snow accumulation on tree branches does not affect location success [15].
Trees are often taller in temperate forests than in boreal forests, therefore it was necessary to test GPS collar performance under temperate forest canopies. Although Bowman et al. [7] tested GPS collar performance in a temperate forest, the canopy cover was relatively thin compared to a typical temperate forest and to preliminary results of GPS tests in temperate mountain forest [1]. We tested GPS performance before deployment on free-ranging red deer (Cervus elaphus L.) in the six dominant temperate forest types of our study area. As suggested by [2], we tested moving collars, which makes it very difficult to closely control environmental parameters (e.g., canopy closure). Our objective was to test the performance of differential GPS collars (location success) in a temperate forest with respect to habitat type, leaf effect, and snow accumulation. We then compared these controlled tests results to GPS location obtained while collars were mounted on seven free-ranging red deer in the same area using two different fix intervals and during leaf-on versus leaf-off period.
2 Study area
We carried out fieldwork in the ‘massif du Bougès’, ‘Parc national des Cévennes’, southern France (44°19′N, 03°45′E). The terrain is mountainous and elevation ranges from 800 to 1400 m. Forest covers about 80% of this area, the remaining 20% being pasture, fallow, and wastelands. Deciduous stands are mainly European beech (Fagus sylvatica). Coniferous stands are more often mixed: spruce (Picea excelsa), Norway spruce (Abies alba), and pines (Pinus spp.), except for a few pure Scotch pine stands (Pinus sylvestris). This forest developed during the second half of the 19th century and presents stands of all ages, but mature forest is dominant.
3 Materials and methods
For movement tests, we used two kinds of GPS 1000 collars (from Lotek Engineering Inc. Newmarket, Ontario, Canada) in differential mode: 12 6-channel GPS collars, software version 2.10 and 2.11 and 9 8-channel GPS collars, software version 2.17. We carried collars on our shoulders at a walking speed of 2–3 km per hour. Wearing the collar on the shoulder was preferred because the presence of the body improves the ground plane underneath the GPS antenna, thus enhancing GPS antenna characteristics and reducing multipath effects, as when mounted on an animal. During each test session, we scheduled 1 fix every 5 min. We conducted tests from November 1997 to September 1999 in seven habitats: one in open field (with a complete view of the sky) and six forest types representative of our study area (Table 1), during the leaf-off period (November to April), with and without snow accumulation on the branches, and during the leaf-on period (May to October). During the tests, more than six GPS satellites were always available. We chose an area where the different habitats were close to each other in order to reduce the variations in topographic obstruction (N 2.88°, NE 2.61°, E 0.42°, SE 6.98°, S 12.68°, SW 9.87°, W 0.30°, NW 0.65°. During tests sessions, we simultaneously moved 2–4 collars until 3–4 consecutive fixes were attempted in each habitat. To determine exactly when each fix was calculated, we listened for a pause in the VHF signal, which occurred during each GPS location attempt.
Characteristics of the forested habitats tested in the ‘Parc national des Cévennes’, ‘massif du Bougès’, southern France, 1998–1999
| Forested habitats (Dominant tree species) | Tree height (m) | Tree spacing (m) | Tree diameter (cm) | ||||||
| Mean | SD | Range | Mean | SD | Range | Mean | SD | Range | |
| Small deciduous | |||||||||
| (Fagus sylvatica) | 16.6 | 1.5 | 15–20 | 1.7 | 1.1 | 0.4–4.0 | 11.3 | 3.8 | 06–22 |
| Large deciduous | |||||||||
| (Fagus sylvatica) | 21.0 | 0.8 | 20–22 | 3.5 | 2.1 | 2.0–7.3 | 21.6 | 4.0 | 16–32 |
| Medium coniferous | |||||||||
| (Pinus sylvestris) | 20.7 | 1.1 | 18–22 | 4.2 | 1.9 | 1.3–8.4 | 27.5 | 4.7 | 20–40 |
| Small mixed coniferous | |||||||||
| (Picea abies, Abies alba, Pinus spp.) | 10.6 | 1.4 | 08–12 | 1.8 | 1.1 | 0.4–5.0 | 14.4 | 5.9 | 07–30 |
| Large mixed coniferous | |||||||||
| (Picea abies, Abies alba) | 23.5 | 1.7 | 20–25 | 5.1 | 1.8 | 3.0–10.2 | 47.6 | 8.7 | 30–65 |
| Very large mixed coniferous | |||||||||
| (Picea abies, Abies alba) | 26.1 | 2.1 | 20–28 | 7.1 | 2.6 | 2.5–12.0 | 64.8 | 19.4 | 25–109 |
We fitted seven free-ranging adult red deer with 6-channel GPS collars, software version 2.11 (Lotek Engineering Inc. Newmarket, Ontario, Canada) from November 1998 to December 1999, and monitored them until December 2000 in the Massif du Bougès. They were caught with the authorization of the ‘Parc national des Cévennes’. Capture methods were approved by the French Ministry of Environment, and two authors of this paper (GJ and DP) were entitled by the French Ministry of Agriculture to experiment on free-living mammals (certificates Nos. 7382 and 7060). Animals were immobilised with a combination of medetomidine and ketamine. We administrated atipamezole as an antagonist to medetomidine. We scheduled fix attempts with 10- and 180-min intervals for each individual. For simultaneously monitored animals, we used the same schedule. Our base station was a 12-channel GPS Pathfinder (Trimble Navigation Ltd.), PFCBS software version 2.67. The distance between the base station and the centre of the study area was approximately 280 km. We differentially corrected data from movement tests using N4WIN software version 1.1895, data obtained from GPS-collared red deer before January 2000 using N3WIN software version 2.40 and data obtained from GPS-collared red deer after January 2000 using N4WIN software version 1.1895 (all software versions came from Lotek Engineering Inc., Newmarket, Ontario, Canada). We pooled locations into 2- or 3-dimensional (2D or 3D) using the number of satellites used to calculate the location. We degraded 3D locations with DOP (Dilution of Precision) ⩾10 to 2D locations for GPS collars on free-ranging red deer.
We conducted statistical analysis using Minitab version 12.2 for Windows (Minitab Inc., PA, USA). We tested the hypothesis that habitat type, 6- versus 8-GPS collars, period (leaf-on versus leaf-off, without snow versus snow accumulation) and fix interval (10 min versus 180 min) had no influence on the proportions of failed, 2D and 3D locations using chi-square tests ().
4 Results
4.1 Movement tests
Location success varied among habitat types for both 6- (, ) and 8-channel GPS collars (, ). These differences are due to an increase in 3D locations in open field and small deciduous habitat, and an increase of failed location attempts under large and very large mixed coniferous cover (Table 2). Overall, 8-channel GPS collars performed slightly better than 6-channel GPS collars (, ), with more 3D locations and fewer failed attempts, except under large and very large mixed coniferous (Table 2). Location success did not differ between leaf-on and leaf-off periods for 6-channel GPS collars (, ) – deciduous habitats were pooled, and the snow period was excluded (Tables 2 and 3).
Location success of 6- and 8-channel GPS collars compared among seven habitats in the ‘Parc national des Cévennes’, ‘massif du Bougès’, southern France, 1997–1999. The collars were shoulder-borne moving at approximately 2–3 km per hour and scheduled to attempt 1 fix every 5 min
| Habitat types | 6-channel GPS collars | 8-channel GPS collars | ||||||
| n | % Failed | % 2D | % 3D | n | % Failed | % 2D | % 3D | |
| Open field | 145 | 1.4 | 16.5 | 82.1 | 51 | 0.0 | 9.8 | 90.2 |
| Small deciduous | 145 | 2.8 | 27.6 | 69.6 | 101 | 1.0 | 18.8 | 80.2 |
| Large deciduous | 140 | 7.9 | 41.4 | 50.7 | 101 | 1.0 | 39.6 | 59.4 |
| Medium coniferous | 107 | 7.5 | 55.1 | 37.4 | 43 | 0.0 | 34.9 | 65.1 |
| Small mixed coniferous | 96 | 1.0 | 51.1 | 47.9 | 43 | 9.3 | 25.6 | 65.1 |
| Large mixed coniferous | 117 | 32.5 | 53.8 | 13.7 | 43 | 27.9 | 60.5 | 11.6 |
| Very large mixed coniferous | 126 | 39.7 | 38.1 | 22.2 | 47 | 25.5 | 61.7 | 12.8 |
Location success of 6-channel GPS collars during a snow accumulation period in the ‘Parc national des Cévennes’, ‘massif du Bougès’, southern France 1998–1999. The collars were shoulder-borne moving at approximately 2–3 km per hour and scheduled to attempt 1 fix every 5 min. Data obtained in deciduous habitat during the leafless period without snow cover are also given for comparison
| Habitat types | Location type | |||
| n | % Failed | % 2D | % 3D | |
| Leaf-off deciduous | 30 | 0.0 | 46.7 | 53.3 |
| Medium coniferous | 15 | 20.0 | 40.0 | 40.0 |
| Small mixed coniferous | 14 | 64.3 | 28.6 | 7.1 |
| Large mixed coniferous | 20 | 95.0 | 5.0 | 0.0 |
| Very large mixed coniferous | 19 | 100.0 | 0.0 | 0.0 |
| Leaf-off deciduous without snow | 182 | 3.8 | 34.1 | 62.1 |
Results of field tests carried out in forested habitats during a snow accumulation period using 6-channel GPS collars are given in Table 3, small and large leaf-off deciduous data being pooled (data obtained in deciduous habitats during the leaf-off period but without snow on branches are also reported in this table). Although noticeable (but not significant) under leaf-off deciduous habitats (, ) and medium coniferous (, ), snow accumulation on branches drastically reduced location success in mixed coniferous habitats (small: , , large: , , very large: , ), with many more failed attempts and few 2D and 3D locations.
4.2 Free-ranging red deer
We recorded 18 538 location attempts from seven free-ranging GPS-collared adult red deer (Table 4). Location success differed between leaf-on (May–October) and leaf-off periods (November–April) (, ) with failed attempts accounting for most of the difference. Location success increased with a shorter location interval (10 min vs 180 min: , ). The observed difference in location success between leaf-on and leaf-off periods was greater with a 180-min fix interval (, ) than with a 10-min fix interval (, ).
Location success of seven simultaneously tracked free-ranging adult red deer with two sampling intervals (10 and 180 min) compared during leaf-off period (November–April) and leaf-on period (May–October) in the ‘Parc national des Cévennes’, ‘massif du Bougès’, southern France, 1998–1999
| Period | Fix interval | Location type | |||
| n | % Failed | % 2D | % 3D | ||
| Leaf-off | 10 min | 1450 | 7.4 | 39.1 | 53.4 |
| 180 min | 9918 | 16.3 | 43.2 | 40.4 | |
| Leaf-on | 10 min | 1450 | 13.4 | 48.5 | 38.0 |
| 180 min | 5720 | 27.0 | 41.3 | 31.6 |
We found a great variation in location success rates among animals, and between leaf-on and leaf-off periods for some individuals (Fig. 1). Female F3 was the only red deer living in a very large mixed coniferous forest and on a north slope with topographic obstruction ranging from 10° to over 30° to the southeast, south, and southwest, and this certainly explains the lower location success obtained for this individual.
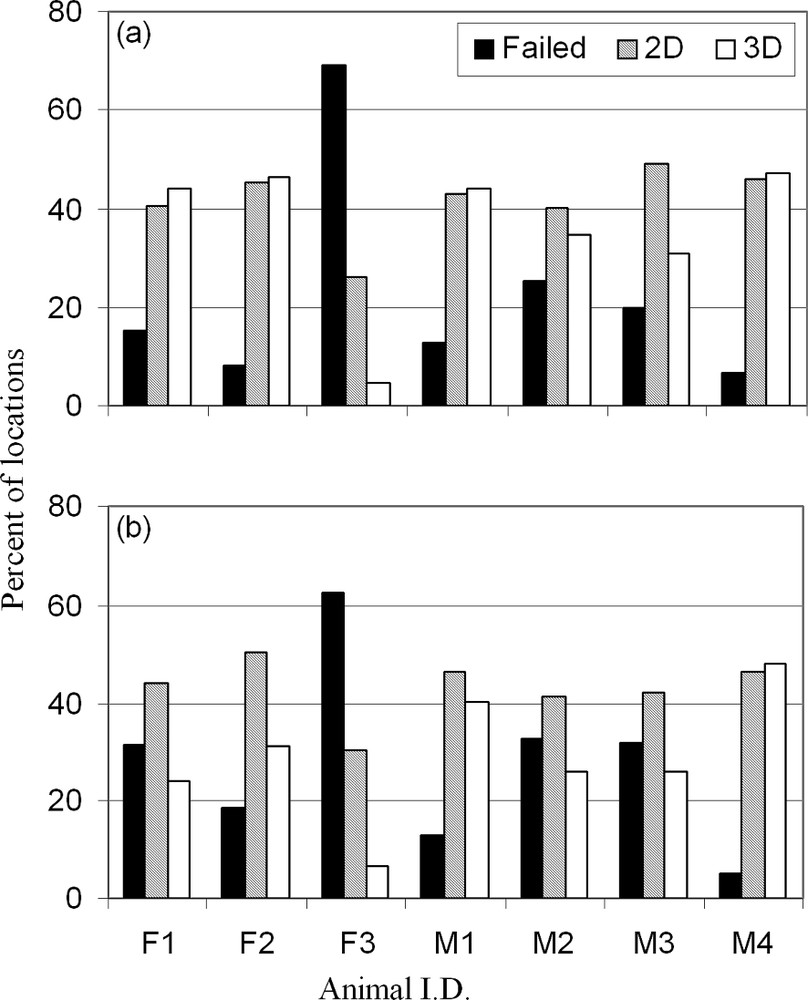
Location success of seven simultaneously tracked GPS-collared adult free-ranging red deer in the ‘Parc national des Cévennes’, ‘massif du Bougès’, southern France, 1998–1999: three females (F1–F3) and four males (M1–M4) during the leaf-off period (a), and the leaf-on period (b), with a fix interval of 180 min.
5 Conclusion
Our results confirm that tree obstruction of GPS signals is a problem: when trees are tall and have a large basal area, GPS performance decreases, as previously demonstrated by [2,3,5,14,15] in boreal forest. As a result, the location frequency of animals in tall coniferous habitats may be underestimated. Unfortunately, we cannot rigorously compare our results with movement tests carried out by [3], because the ground plane was very different between the two studies, and because his field trial was carried out only along a forest trail.
During the movement tests, we found no negative effect of leaf presence on 6-channel GPS collars. Therefore, the increased location success recorded on free-ranging red deer during leaf-off season cannot be explained by leaf absence, but rather by modifications in spatial behaviour of individuals [3,14,15]. Habitat use changes seasonally and daily (e.g., [17]), and will consequently result in changes in obstruction, due to both forest type and topography. Topographic effects, in particular, can be far more important in mountain environments (see female F3 in Fig. 1 as an example) because of increased multipath probability. The variability of fix success obtained from simultaneously tracked GPS-collared red deer seems to confirm this hypothesis.
Snow accumulation on the branches of mixed coniferous trees had a negative effect on location success. Dussault et al. [15] did not observe this effect maybe because trees were smaller in their study area than in temperate forests. Snow quality could be another possible explanation, as during our test snow was very wet and not very cold, and may have absorbed signals more than very cold, dry snow.
Our results also indicated that fix interval influenced GPS location success. However, we did not find references to this technical parameter in the wildlife literature, except in our preliminary results [6]. One part of the fix interval effect can be explained as follows: to acquire a fix, a GPS receiver must know the ephemeris (detailed information about orbit and location) of each visible satellite. Some time is necessary to download ephemeris data from a newly visible satellite. When a GPS collar is scheduled to record successive fixes with a short interval, the probability that the satellite constellation remains more or less unchanged is greater than with a longer fix interval, so the GPS collar does not have to download several new ephemeredes. Consequently, with an unchanged visible satellite constellation, all the time that a GPS receiver is active can be used to collect information broadcast by the satellites needed to calculate a location. If several new ephemeredes must be collected, GPS receivers are less effective and, when the obstruction is important, the amount of time remaining for the GPS receiver to acquire a fix can be short. In mountain environments, multipath can also have an important effect on GPS performance. These drawbacks will probably be reduced in the future by the use of 12-channel GPS receivers, with more time allowed for signal acquisition.
Preliminary tests should always be conducted when GPS collars are to be used in new environments, particularly when focusing on habitat use [2–4,15]. Moreover, movement tests should simulate as precisely as possible animal-borne GPS collars. By conducting movement tests in our temperate forest mountain conditions, we found that even if the performance of GPS collars decreased under mixed coniferous forests with tall trees (>20 m), a relatively high proportion of location attempts remained successful. However, location success for free-ranging animals in areas with tall trees and topographic obstructions can be drastically reduced. Knowledge of decreased location success rates in specific habitats could be used to calculate a correction factor when habitat use is evaluated [15]. During snow period, we found poor GPS performance among mixed coniferous habitats. Consequently, it is necessary to be aware of this potential problem when collecting GPS locations during snow periods, to correctly determine habitat use of collared animals.
Acknowledgments
Funds were provided by the ‘Institut national de la recherche agronomique’ (INRA) and by the ‘Conseil régional of Languedoc-Rousssillon’ (‘arrêté’ No. 994187). C. Adrados was supported by a grant from both Office National des Forêts (ONF) and INRA. We would like to acknowledge the staff of the ‘Parc national des Cévennes’ and of the ONF for allowing the work to be done and for their assistance with fieldwork, J. Vandenhelzen and L. Mecksarski of Lotek Engeneering for technical assistance. J.-M. Angibault, B. Cargnelutti, N. Cebe and D. Picot of INRA provided helpful assistance for capturing and collaring the red deer. We thank A.R. Rodgers (Ontario Ministry of Natural Resources), F. Spitz (INRA), J.L. Bowman (University of Delaware), and R. Moen (Natural Resources Research Institute, Minnesota) for their helpful comments on an earlier version of this paper.