

Abridged English version
1 Introduction
Flash floods are defined as floods with sudden apparition, difficult to prevent, with rapid rising time and important specific flow. These flash floods are linked to intense rain events and occurred on little basins [2,19,24]. Their socio-economic consequences are important and their anticipation is a problem of great interest on economic and scientific points, as the flash flood of November 1999 in the South of France demonstrated.
Needs for hydrological simulation are very different from those for hydrological prediction [10]. The use of models like TOPMODEL [5], for example, gives satisfactory information for simulation but cannot supply any prediction [12,13].
The rareness of these events makes the statistical analysis and the calibration of deterministic hydrological models delicate. A simplified hydrological physically based model taking into account the spatial variability of the different processes involved (including the rain) seems to be an available solution for improving flash-flood forecast. With a view to that, we conceived the model MARINE, which is a hydrological model adapted to the peculiarities of real-time operational prediction. MARINE is distributed, deterministic, perceptual and physically based [12]. Montz and Gruntfest [24] insist on the fact that a few minutes lost during the crisis phase can have catastrophic consequences: we have to choose between a precise forecast and a sufficient anticipation. In accordance with the experienced forecasters (‘Services d'annonces des crues’, Météo France), with the remote sensed data suppliers, and of course with different fields researchers, we decided to prioritise the calculation rapidity (a few minutes are available), the integration in real time of all the available data and of remote-sensed data, and the pertinence of the supplied information. The results of the simulation of the flood of November 1999 are in accordance with the observations and furthermore they can be obtained in real time for risk-management applications.
The will to improve the flooding-risk management (flash floods in the South of France, plain floods in the North) over its different phases (prevention, early warning, crisis, post-crisis) led the French Ministry of Research and the French Space Agency (CNES) to start, in January 2000, a two-year pre-operational application project, called PACTES [3,11]. PACTES is a transverse, multi-disciplinary effort that associates the operational users (Civil Protection, Flood Warning Services, regional land planning services), leading scientific institutions in the domains of meteorological and hydrological simulation, and the space industry. This has led to the pre-operational deployment of a demonstrator in three French watersheds: Moselle, Hérault, and Thoré. About the Thoré Basin, the goal of PACTES was to include MARINE, which integrates remote-sensed data, to forecast flash floods in real time.
In front of the successful PACTES experience, a follow-up project applied to the ‘Midi-Pyrénées’ Region started.
2 Data
MARINE has been tested for the flash flood of the Aude, Orbieu and Thoré on the 12 and 13 November 1999, and also for other floods, that were less violent but with the same nature, that occurred in the Gard Basin between 1995 and 1997. About the Orbieu flood, we had a set of data necessary to run MARINE. During this flood, the Orbieu River was the tributary of the Aude River that supplied an important part of the water flood. Since observations are available on this location, we chose to study the upstream part of the Orbieu basin with the choice of the village of Lagrasse as basin outlet (250 km2). Nevertheless, at this time, the data are not complete; particularly, we do not have any meteorological radar image, but only the three rain gages of the basin. For this kind of event, the spatial variability of the rain is very important and can have a strong influence on the flood hydrograph. In order to spatialise the rainfall data, Thiessen repartition of the rain gages was implemented. Maximal rainfall intensity is 60 mm h−1, its duration is about 1.5 days and the cumulative rain on the basin is between 300 and 400 mm.
The Digital Elevation Model (DEM) is extracted from the BD IGN with a horizontal spatial resolution of 50 m and the land-use map is interpreted from a LANDSAT TM image (Fig. 1).
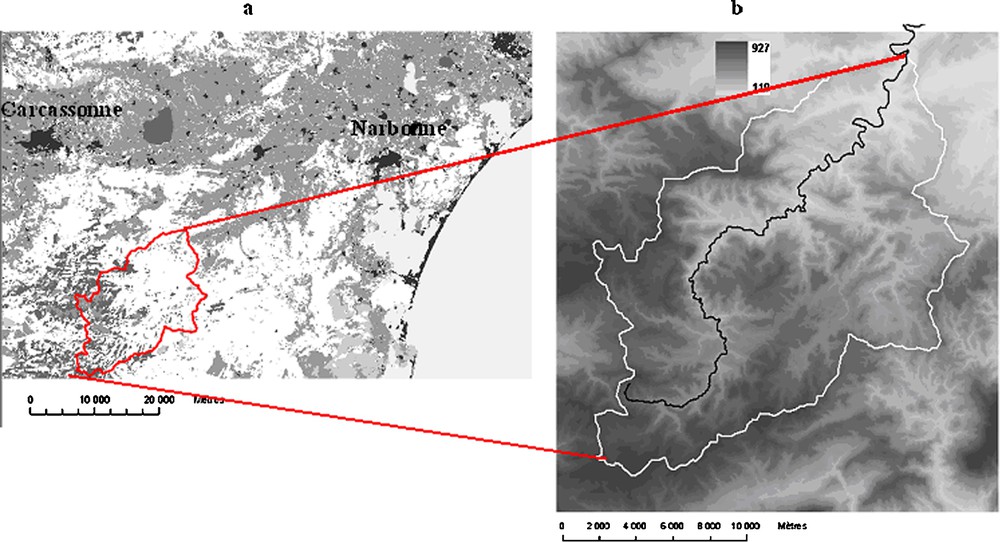
(a) Image satellite Landsat pour la détermination de la couverture des sols (Aude – France). (b) MNT dans la zone du bassin versant de l'Orbieu à Lagrasse.
(a) Satellital picture Landsat in order to determine soil occupation (Aude – France). (b) DEM in the Orbieu River watershed at Lagrasse.
The soil composition is sand, loamy sand, sandy clay loam. Information about the initial humidity content of the soil is until now limited: it concerns only initial base flow and previous rainfall monthly amounts. For the floods that occurred on the Gard Department, the available data were similar, but complemented by rainfall radar images and by more precise in situ observations.
3 Method
MARINE [12,14,15] is composed of two different modules and one pre-treatment (Fig. 2).
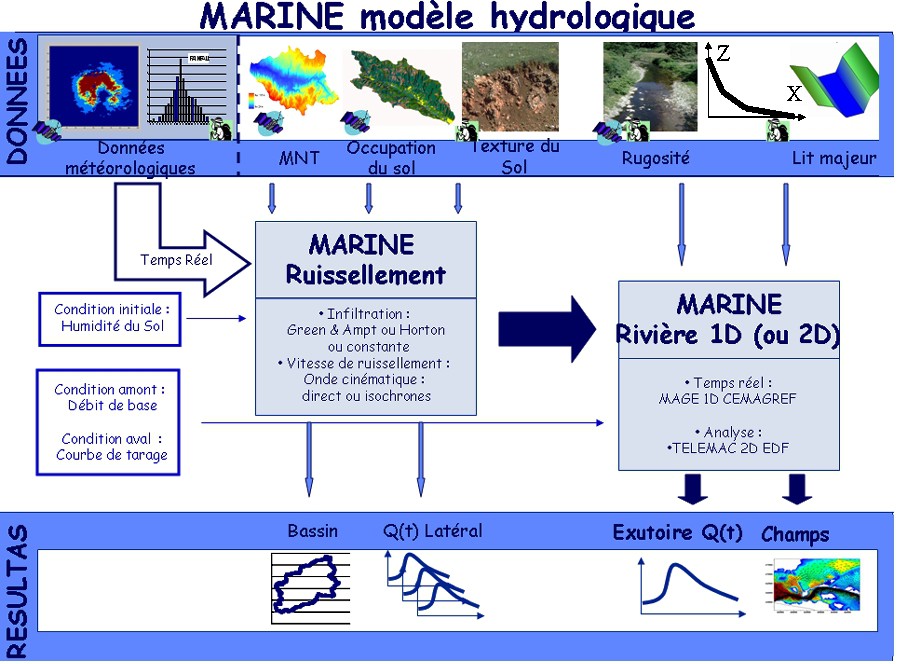
Synoptique général de MARINE.
General synoptic of MARINE.
The hydrological module of MARINE is a rainfall–runoff model. The minimal necessary data are the DEM, the land-use map and the nature of the soil. The initial condition is an estimation of the initial water content in the soil. The real-time data are the rainfall water depth (calculated from the radar images by the atmospheric models developed by Météo France). All these data can be remote-sensed ones. This module supplies flood hydrographs of the hillslopes all along the main river, which constitutes the input of the following module.
The hydraulic module of MARINE is a flood propagation 1D model. It solves the Saint-Venant equations with the MAGE code from CEMAGREF [16]. The necessary data must allow a representation of the minor and medium beds of the river (longitudinal profile, cross sections, roughness). The module supplies floods hydrographs all along the main river and in particular at the outlet of the basin. If data measurements are lacking, a well-built scheme of the river bed appears to be sufficient for the obtention of real-time pertinent information. The available data fix the accuracy of the calculated flood hydrographs and thus the accuracy of the forecasted inundation fields.
Real-time forecast imposes to realize some simplifications to model the physical processes involved. Since for the floods of interest the surface runoff is the dominating process, we can neglect, due to their rapidity and to the volume of water they carry, evapotranspiration [26], interception [8] and lateral underground transfers [4]. Rainfall heterogeneity is taken into account [9,21] and a Hortonian concept is supposed for runoff generation [1,18], even if this option is questionable [6,7,17].
The first task of MARINE is to treat the DEM in order to get it hydrologically coherent (i.e. able to assure the spatial continuity of the water routing). Then, MARINE evaluates the watershed delineation to detect the different contributing parts of the basin which have a hydrological influence on the outlet. Runoff and infiltration models have to be adapted to the basins and to the data.
The runoff model is based upon the kinematic wave approximation. It can either be precisely calculated with an Eulerian – if necessary, a reduction of the spatial data resolution in order to obtain sufficiently short computation time can be done. Another method can be conceptualised through the variable isochrons, taking into account the slopes and the land use. The parameterization of these isochrones is realized with the evaluation of the equilibrium time of the basin – derived from the kinematic wave approximation. The infiltration is modelled either with a constant runoff coefficient or with Hortonian scheme, or with the Green and Ampt model.
The frontier between the hydrological and the hydraulic modules of MARINE is defined with the limit of validity of the kinematic wave approximation [25]. The whole basin, except the main hydrographic network, generally supports the kinematic wave approximation on the scale of interest, but the main river and often one or two of its tributaries have to be treated with the full dynamic equations.
Because of the rareness of the observed data during flash floods, calibration consists more in pre-determination of parameter values than in optimisation. MARINE includes from three to six parameters physically based on the conceptualisations used inside the model and possibly on the initial conditions of soil humidity.
4 Results and discussion
The river water elevations observed give information on the flows that occurred at Lagrasse. But this indication is full of uncertainties due to the extrapolation of the stage discharge relationship and to the observed values of the flow themselves linked to the difficulty of their measurement. Simulation results are presented in Fig. 3.
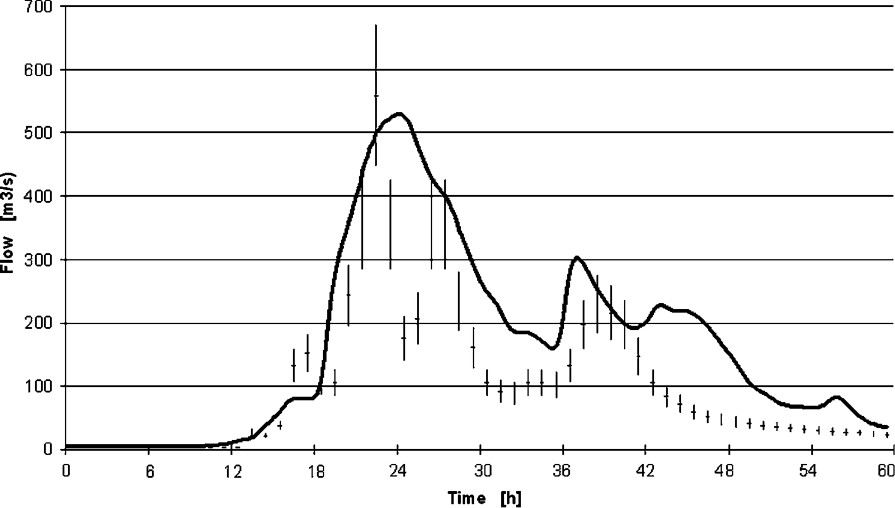
Hydrogramme de crue à Lagrasse, novembre 1999. + : observation et incertitude ; — Simulation avec MARINE, calage avec un modèle d'infiltration de Green et Ampt.
Flood hydrogram at Lagrasse, November 1999. + : observation and incertitude; — Simulation with MARINE, calibration with an infiltration model of Green and Ampt.
Rainfall spatialisation appears essential for the simulation of such events. So, in this case, we started the simulation with the rain gages to get a first idea of the potentiality of MARINE. As mentioned before, the final results will take into account the radar rain. The calibration in this case concerns the initial water content of the soil. Some tests put in evidence that this parameter influences essentially the volume of the flood hydrograph for this kind of event. The characteristics times of the hydrographs do not need calibration, as they present a very good accordance with the observations.
The knowledge of initial humidity of the soil from complementary tools will be a considerable advance in this model. Presently, relatively basic data assimilation supplies this parameter by running different initial conditions and keeping the values for which the discharge curve matches better with the real-time observations at the beginning of the storm.
For the floods of 3 and 5 October 1999 on the Basin of the ‘Gardon de Saint-Jean’ River, with Corbès for outlet, the obtained results are presented in Fig. 4. In this case, all the spatialised data are available.
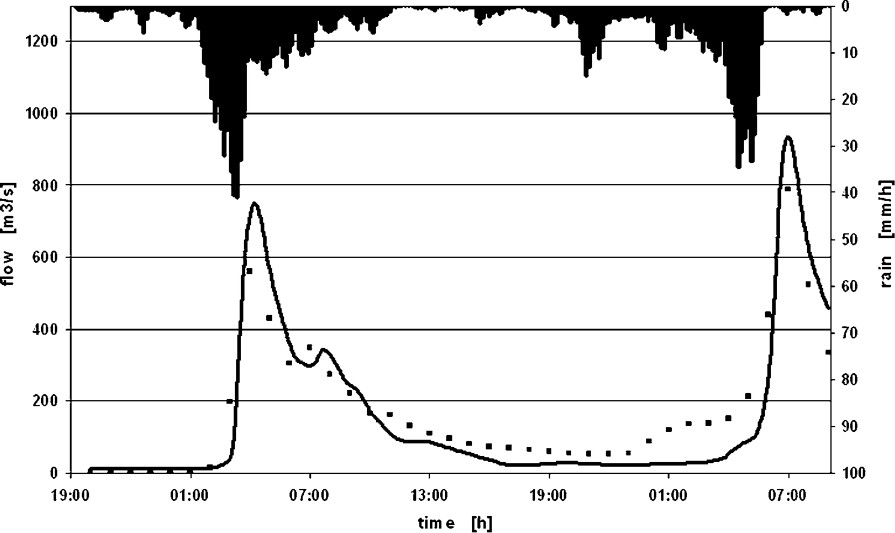
Hydrogramme et hyétogramme à Corbès – Novembre 1995. ▪ : observation ; — Simulation avec MARINE.
Hydrograph and rainfall intensity pattern at Corbès obtained – November 1995. ▪: observation; — MARINE simulation.
These results are very similar to the observations. In this case, the flood is not a flash-flood one, but it is important enough to assume that MARINE can be used. Furthermore, the observations are more reliable and some calibrations on past events are possible [13].
5 Conclusion
MARINE is the formulation of a relatively basic physical approach with adequate numerical method. This particularity makes this model conform to the objectives of real-time forecasting flash floods with a sufficient precision. The minimum information needed to make MARINE run are essentially observations from satellite, rainfall meteorological radar observations, and, if possible, rainfall forecast, and some ground additional observations.
In order to evaluate the potential role of the saturated contributing area on the genesis of these particular floods, TOPMODEL has been used. Even if it does not supply good results in terms of prediction, these tests should be completed by the use of another model like TOPKAPI for example [22].
The results obtained on little watersheds of the South of the France indicate that MARINE is applicable for such flash-flood simulations. Furthermore, its integration inside the PACTES demonstrator and its use by one National French Flood Forecast Service show that MARINE supplies the forecasters with well-fitted information.
But MARINE will not replace the knowledge of the forecasting service. Their experience still remains a point impossible to circumvent. They have to interpret MARINE's results in real time, to evaluate the possibility of apparition of such an event, and to appreciate the pertinence of the results supplied by MARINE.
1 Introduction
1.1 Contexte général de la prévision des inondations
La gestion de l'eau est d'une importance capitale pour le développement de l'occupation du territoire : elle pose des problèmes d'usage, de pénurie et d'inondation. Les inondations sont parmi les catastrophes naturelles qui touchent le plus de communes en France (entre 1982 et 2001 – hors crues de 1999 ! –, 54 672 occurrences de ce type sur 24 269 communes [20]). La prévision et la gestion d'une crue sont des procédures réglementées extrêmement complexes. Pour des crues relativement lentes, qui évoluent suivant une échelle temporelle de l'ordre de la journée ou plus et qui concernent des bassins versants moyens à grands (plus de 1000 km2), les moyens d'instrumentation, de télésurveillance et de prévision assurés par les Services de prévision des crues (SPC) peuvent être suffisamment performants POUR permettre une gestion de crise efficace. Pour les crues éclair ou rapides, comme celle de novembre 1999, survenue dans le Sud de la France, ces méthodes de prévision sont nettement moins efficaces. Les SPC reçoivent alors l'appui du SCHAPI, qui assure alors une veille hydrométéorologique 24 h sur 24 en période de crue torrentielle.
1.2 Contexte spécifique des crues éclair
Dans le contexte des crues éclair, les observations sont difficiles à acquérir : dispositif de mesures pluviographiques de densité insuffisante, destruction des appareils de mesures limnimétriques, extrapolation excessive des courbes de tarage. Un bassin soumis à une crue éclair rentre alors, pour cet événement, dans la catégorie des bassins peu ou non jaugés. Les modèles hydrologiques classiques de prévision des crues utilisant de longues chroniques d'observation pluie–débit pour leur calage sont alors inefficients pour les bassins mal jaugés et inutilisables pour les bassins non jaugés.
Il est possible de trouver dans la littérature plusieurs définitions des crues éclair (comme par exemple [2,19,24]). Le seul critère de définition commun à tous ces auteurs est leur apparition et leur évolution soudaines (réponse hydrologique rapide, temps de montée de crue rapide, violence). D'autres critères reviennent souvent, mais pas de façon systématique, comme les pluies diluviennes qui en sont à l'origine, l'importance des débits dans les rivières, leur localisation géographique, les difficultés à les prévoir (et éventuellement les dégâts qu'elles engendrent). Dans tous les cas, l'aspect exclusivement qualitatif et non exhaustif de ces définitions, ainsi que le fait de ne caractériser ces crues qu'à travers leurs évolutions et leurs conséquences, laissent entrevoir les difficultés auxquelles on est confronté lorsque l'on envisage de les étudier.
1.3 Modèles de simulation et modèles de prévision
« Pour une utilisation opérationnelle en prévision, on a besoin d'une modélisation spécifique fort différente des besoins de l'hydrologie appliquée à la compréhension et à la reconstitution du cycle de l'eau : simuler n'est pas prévoir. Cependant, des améliorations de la connaissance peuvent contribuer à l'un ou l'autre des objectifs. » [10]. L'objectif que nous nous sommes fixé n'est pas de présenter ce que l'on pourrait faire avec des données que l'on n'a pas, mais plutôt de définir ce que l'on peut faire, en terme de prévision opérationnelle, avec les données disponibles.
La mise en œuvre de TOPMODEL, qui s'appuie sur une description des crues par apparition de zones contribution saturées [5], a permis de reproduire la réponse hydrologique des bassins pour différents types de crues, dont les crues éclair. Toutefois, seule la prévision (au sens d'anticipation) des crues qui n'étaient pas des crues éclair a été possible [12].
1.4 MARINE
Afin de prévoir opérationnellement des crues éclair, nous avons finalement conçu et développé un modèle hydrologique particulier (MARINE). À la suite de l'expertise des prévisionnistes de terrain (Services de prévision des crues, Météo France), des fournisseurs de technologie spatiale et, bien sûr, des chercheurs de différentes spécialités hydrologiques, l'accent a été donc mis sur la rapidité de calcul du code (quelques minutes seulement sont disponibles [24]), la prise en compte des données en temps réel et la pertinence des informations fournies.
Nous avons donc construit un modèle hydrologique déterministe, distribué, perceptuel et à base physique. Il prend en compte la variabilité spatiale des différents processus physiques mis en jeu et suppose un certain nombre de simplifications dans la représentation de ces processus, compatibles avec la nature des crues éclair, afin de servir les objectifs de prévision. Les temps de calcul sont courts et les paramètres du modèle sont porteurs d'un maximum de sens physique, de façon à être mesurables, anticipables ou portables.
La volonté d'améliorer la gestion du risque d'inondation (dont les crues éclair) pour ces différentes phases (prévention, alerte, gestion de la crise et post événement) ont amené le ministère français de la Recherche et l'Agence spatiale (Cnes) à lancer en janvier 2000, sur une durée de deux ans, un projet appliqué pré-opérationnel, dénommé PACTES [3,11]. Le projet PACTES résulte d'un effort transversal et pluridisciplinaire, associant les utilisateurs opérationnels (Protection civile, services de prévention contre les crues, services régionaux d'aménagement du territoire), les institutions scientifiques dans les domaines de la météorologie et de la simulation hydrologique, ainsi que l'industrie de l'Espace. Ce projet, achevé en décembre 2002, a conduit au déploiement d'un démonstrateur informatique portant sur trois bassins versants français représentatifs : Moselle, Hérault et Thoré. Concernant le bassin du Thoré, le but de PACTES était d'intégrer un modèle de prévision des crues éclair opérationnel (MARINE) mettant en jeu les données issues de l'imagerie satellitale, en vue de la prévention en temps réel contre les crues éclair.
Consécutivement à l'expérience réussie que constitue PACTES, de nouveaux redéploiements sont actuellement en préparation.
2 Données
MARINE a été appliqué au cas de la crue de l'Aude, de l'Orbieu et du Thoré des 12 et 13 novembre 1999, considérée comme étant une crue éclair, mais aussi pour des crues moins violentes, mais de genèses semblables, survenues sur certains petits bassins versants du Gard entre 1995 et 1997.
En ce qui concerne l'anticipation de la crue de l'Orbieu, nous disposons d'un jeu de données nécessaires à la mise en œuvre de MARINE. L'Orbieu est un affluent de l'Aude en rive droite. Durant la crue de novembre 1999, l'Orbieu est l'affluent qui a le plus contribué à cette crue. Nous avons choisi d'étudier la partie amont de ce bassin en retenant le village de Lagrasse pour exutoire, puisque des observations de débits y étaient disponibles (250 km2).
Les données de pluies ne sont pas complètes à l'heure actuelle. En effet, nous disposons de trois pluviographes sur le bassin, mais pas de données radar tous les quarts d'heure. De fait, la variabilité spatiale des cellules convectives responsables de cette averse n'apparaît pas sur nos données, alors que, pour ce genre d'événement, elles sont capitales. Nous avons donc, dans un premier temps, utilisé les pluviographes et nous les avons répartis sur le bassin suivant la méthode de Thiessen. Les intensités maximales observées sont de 60 mm h−1, la durée de la pluie est de 1,5 j et le cumul sur le bassin serait de l'ordre de 300 à 400 mm.
Le MNT est un MNT BD TOPO IGN, avec une résolution horizontale de 50 m ; la carte d'occupation des sols est issue d'une image Landsat TM re-classifiée par la société SCOT (Fig. 1).
La nature du sol varie selon les endroits entre du sable, du sable limoneux, du sable argileux et du limon sablo-argileux. Les informations sur l'état initial d'humidité du bassin se limitent aujourd'hui à la connaissance du débit de base et aux cumuls pluviométriques des mois précédents.
Dans le cas des crues du Gard, les données étaient du même type que celles-ci, complétées par des images de pluies radar, ainsi que par des observations de débits plus certaines.
3 Méthodes
La chaîne de modélisation de MARINE [12,14,15], est composée de deux éléments (Fig. 2).
Le module hydrologique de MARINE est un modèle de type pluie–débit. Les données minimales nécessaires sont le modèle numérique de terrain, la carte d'occupation des sols et la carte pédologique de celui-ci. Les conditions initiales résultent d'une estimation de la teneur en eau initiale du sol. Les données en temps réel sont la hauteur d'eau précipitée (calculée à partir des images radar par les modèles météorologiques de Météo France). Toutes ces données peuvent être d'origine satellitale. Ce modèle fournit les hydrogrammes de crue des sous-bassins en n'importe quel point de la rivière. Ces derniers sont les entrées du second module de MARINE.
Le module hydraulique de MARINE propage la crue dans les cours d'eau principaux et permet de connaître l'hydrogramme de crue à l'aval. Pour permettre une utilisation en temps réel, il résout les équations de Barré de Saint-Venant, à l'aide du code de calcul 1D MAGE du Cemagref [16]. Les données minimales requises sont une représentation du lit mineur (profil en long, profils en travers, rugosité...) ainsi qu'une représentation du lit moyen (reconstitué à partir des lignes de niveau du MNT, par exemple, et une estimation de la rugosité). Ce module fournit des hydrogrammes de crue tout le long de la rivière et en particulier à l'exutoire du bassin versant. Lorsque les mesures précises font défaut, une schématisation bien construite du lit de la rivière peut suffire à fournir des résultats adaptés à la prévision en temps réel. Les données disponibles vont ainsi fixer la précision des hydrogrammes de crue calculés par le modèle hydraulique et, par suite, la précision des zones inondées.
La prévision en temps réel impose que l'on fasse des hypothèses sur le fonctionnement de la crue.
- – Les pluies diluviennes à l'origine de certaines crues éclair présentent une forte variabilité spatiale et temporelle, avec de fortes intensités dès le début de l'événement, à cause de la quasi stationnarité des cellules convectives. Les travaux de Krajewski et al. [21] et de Datin [9], par exemple, tendent à montrer que la connaissance des intensités, durées et extensions spatiales de ces pluies, ainsi que leur prévision à court terme, sont autant d'éléments qui devront être pris en compte dans les modélisations des crues éclair que nous allons réaliser.
- – L'évapotranspiration et l'évaporation seront négligées, en raison du fait que l'adaptation d'une formule de type Penman 1956–1963 à une modélisation distribuée nécessiterait l'introduction de nouveaux paramètres, pour finalement aboutir à des quantités d'eau potentiellement évaporées de l'ordre du pourcent, comparées aux volumes précipités lors d'une crue éclair. Thirriot [26] précise que, la répartition de l'eau à travers le cycle hydrologique étant fonction des échelles spatio-temporelles auxquelles on travaille, le phénomène d'évaporation effective appréciable peut être négligé lorsque l'échelle temporelle est la durée de la pluie.
- – L'interception par la végétation est extrêmement variable dans le temps et dans l'espace. Nous retiendrons, pour un milieu tempéré, une hauteur d'eau équivalente interceptée de l'ordre du millimètre, sur la surface occupée par la végétation [8]. Le pourcentage intercepté diminue quand l'intensité de la pluie augmente et quand le volume précipité augmente. Devant le manque de mesures de ces processus particuliers, nous négligerons ces phénomènes dans la modélisation opérationnelle des crues éclair.
- – Les écoulements souterrains horizontaux ne seront pas considérés dans cette modélisation, en raison du fait de leur échelle de temps, incompatible avec la problématique des crues éclair. Les conductivités hydrauliques des sols conduisent à des temps de transfert généralement sans commune mesure avec la dynamique des crues éclair [4].
- – Enfin, le processus physique dominant retenu pour la modélisation de la genèse de crues éclair sur nos bassins méditerranéens est le suivant : les pluies très importantes et très violentes rendant les sols peu perméables, la part de ruissellement direct surfacique devient majoritaire dans ce processus. Nous avons choisi dans MARINE de faire l'hypothèse d'une genèse par limitation de la capacité d'infiltration [1,18], bien que cette hypothèse soit discutable [6,7,17].
La première tâche du module hydrologique est de traiter le MNT de façon à le rendre hydrologiquement cohérent (c'est-à-dire capable d'assurer la continuité spatiale du cheminement de l'eau). Ensuite, MARINE évalue la frontière du bassin versant, de façon à repérer les points reliés hydrologiquement à l'exutoire du bassin. La modélisation du ruissellement et de l'infiltration s'adapte aux bassins et aux données disponibles pour l'étude.
Le ruissellement sur les versants peut être modélisé :
- – soit par l'équation d'onde cinématique, qui s'est avérée applicable dans les cas étudiés. La résolution des équations de conservation de la masse, pour chaque maille du domaine (celles du MNT), se fait selon la méthode d'intégration des volumes finis avec un schéma explicite en temps. La résolution permet de définir les hydrogrammes de crues correspondant aux apports latéraux dans les cours d'eau principaux ;
- – soit par le concept des isochrones, où les écoulements superficiels suivent la pente maximale, à une vitesse variant en fonction de la pente et du coefficient de Manning (issu des cartes d'occupation du sol spatiale). Le paramètre de calage de ces isochrones est le temps de concentration du bassin. La reconstitution est obtenue par un produit de convolution entre les pluies et les aires correspondant aux temps de parcours adéquats.
La modélisation des pertes par infiltration peut se faire de plusieurs façons :
- – soit par un modèle d'infiltration à coefficient de ruissellement constant ;
- – soit par un schéma hortonien ;
- – soit par le modèle de Green et Ampt.
La frontière entre les modules hydrologique et hydraulique est définie par la limite de validité de l'approximation de l'onde cinématique [25]. La totalité du bassin, à l'exception du réseau hydrographique principal, supporte généralement cette hypothèse pour l'échelle considérée, mais la rivière principale et souvent un ou deux de ces affluents nécessitent d'être traités en utilisant l'équation dynamique complète.
Les tests de validation et les procédures de calage ne peuvent être ceux habituellement réalisés sur des modèles numériques hydrologiques classiques, puisque les crues éclair se caractérisent le plus souvent par leur manque chronique d'observations et de mesures. Ainsi, le calage effectué n'est pas supposé être le calage optimal, mais un calage réalisable a priori, c'est-à-dire avant l'événement lui-même, et fournissant une représentation de l'hydrogramme de crue adaptée aux objectifs de la prévision opérationnelle. Il s'agit donc de prédétermination des paramètres physiques du modèle plutôt que de calage du modèle. La validation a été envisagée à travers des modélisations de différentes crues éclair [12].
Ainsi, le type ou nombre de paramètres à caler ou à prédéterminer est, pour les modèles de ruissellement, le coefficient de frottement (un paramètre), pour le modèle de propagation 1D dans les rivières, un coefficient de frottement sur le fond et les parois, une courbe de tarage et des conditions aux limites et, pour les modèles d'infiltration :
- – pour le modèle à coefficient de ruissellement constant, un paramètre ;
- – pour le concept hortonien de l'infiltration, deux paramètres et une condition initiale ;
- – pour le modèle d'infiltration de Green et Ampt, trois paramètres et une condition initiale.
4 Résultats et discussion
Les hauteurs d'eau observées à Lagrasse nous renseignent sur les débits, mais il ne s'agit que d'une indication bien incertaine au vu de l'extrapolation de la courbe de tarage qui doit être réalisée. Nous constatons aussi que les valeurs des points d'observation représentent des débits d'égale amplitude pour des intervalles de temps réguliers.
La répartition des pluies est essentielle pour ce type de simulation. Ainsi, dans ce cas, nous avons lancé la simulation avec les pluviographes, qui nous permettent d'avoir une première idée des potentialités de MARINE. Comme nous l'avons remarqué précédemment, les résultats définitifs prendront en compte les données de pluie radar.
Les sous-modèles de MARINE ayant été utilisés pour obtenir les résultats présentés sur la Fig. 3 sont le modèle de ruissellement selon le concept des isochrones et le modèle d'infiltration de Green et Ampt. La condition initiale d'humidité a été imposée. Les valeurs de prédétermination des paramètres correspondent à celles de [23].
Des tests de sensibilité ont montré [12] que, de tous les paramètres, celui qui influence le plus les résultats est la conductivité hydraulique effective du sol. L'humidité initiale a, en revanche, une influence moins marquée sur les hydrogrammes de crue : ce paramètre influence essentiellement le volume de l'hydrogramme pour ce type d'événement. Il est cependant possible que cet état hydrique initial influence de façon plus conséquente les hydrogrammes. Pour cela, il faudrait que les fortes intensités de pluies s'abattent sur des sols plus lourds (argileux) où, bien que les intensités de pluie soient plus faibles, les temps de formation des flaques (time ponding) seraient alors plus longs et la sensibilité du modèle serait différente.
La connaissance de l'état initial d'humidité par des outils complémentaires constituera une avancée significative pour ce modèle. Actuellement, l'intégration de méthodes relativement basiques d'assimilation de données fournit ce paramètre, en effectuant des séries de simulations basées sur des conditions initiales différentes. Les valeurs pour lesquelles la courbe de débit coïncide au mieux avec les observations en temps réel, au début de l'orage, sont conservées.
Notons enfin que les temps caractéristiques de celui-ci ne nécessitent pas de calage, car ils présentent une très bonne concordance avec les observations.
À titre de comparaison, retenons un des résultats obtenus sur un petit bassin versant du Gard, pour lequel toutes les données spatialisées étaient disponibles, présenté sur la Fig. 4. Il s'agit de la crue du 3 au 5 octobre 1995 sur le bassin du gardon de Saint-Jean, ayant pour exutoire Corbès. Là encore, les intensités et les dates caractéristiques des hydrogrammes de crue prévues correspondent relativement bien aux observations en temps réel.
Les résultats obtenus pour cet événement sont très proches des observations, du fait de la bonne qualité des données et de la moindre violence de la crue (moins d'incertitudes sur les observations, calage possible sur des événements semblables et passés) [13].
5 Conclusion
MARINE repose sur la formulation simplifiée de processus physiques complexes, en utilisant des méthodes numériques adaptées. Cette particularité rend le modèle conforme aux objectifs de la prévision des crues éclair en temps réel, avec une précision suffisante. Les informations minimales nécessaires à MARINE sont les données issues de l'imagerie satellitale (MNT, occupation des sols) et les observations du radar météorologique (lames d'eau HYDRAM), ainsi que des informations relatives à la nature du sol. Ce modèle a été conçu pour être appliqué à des petits bassins versants présentant de fortes pentes et soumis à des précipitations intenses, conduisant à une prédominance du phénomène de ruissellement pour la genèse de la crue.
Afin d'évaluer la part de la genèse de crue due à la dynamique des zones contributives saturées, TOPMODEL a été testé sur ces bassins et n'a pas fourni de résultats satisfaisants en terme de prévision. Afin d'aller plus loin dans cette analyse, il serait intéressant de tester un modèle tel que TOPKAPI [22].
Les résultats obtenus sur différents petits versants du Sud de la France démontrent la potentialité de ce modèle à représenter ce type de crue. De plus, son intégration à l'intérieur du démonstrateur PACTES, suivie de son application en mode pré-opérationnel dans un service d'annonce de crues français, a confirmé sa capacité à fournir des résultats en temps réel.
Toutefois, MARINE ne remplacera pas l'expertise des prévisionnistes, dont l'expérience demeurera toujours irremplaçable. Ces derniers doivent interpréter les résultats de MARINE en temps réel, évaluer les possibilités d'occurrence d'un tel événement et apprécier la pertinence des résultats fournis par MARINE.
Remerciements
Les auteurs remercient l'Institut de mécanique des fluides de Toulouse, laboratoire au sein duquel ces travaux se sont déroulés, ainsi que la direction départementale de l'Aude pour la fourniture des données. Ils associent à leurs remerciements tous les partenaires, acteurs ou fournisseurs de données : Adage Développement, Alcatel Space Industries, Astrium, BRGM, Cemagref, Sécurité civile, Cnes, DDE, Diren, EADS S&DE, ESA, Flood Alert Services, ministères français de la Recherche et de l'Environnement, IGN, IRIT, Météo France, Sertit, Scot, Spot image.
Vous devez vous connecter pour continuer.
S'authentifier