

Version française abrégée
Introduction
Dans la séquence de traitement des données sismiques, la reconnaissance et l’atténuation du bruit est une étape importante. Les méthodes conventionnelles utilisent les propriétés physiques qui différencient le signal du bruit, telles que vitesse apparente, nombre d’onde, temps de trajet…par l’application d’algorithmes de filtrage ou de prédiction du bruit par modélisation [1,8,9,13]. Le bruit prédit sera ainsi soustrait des données sismiques. Cependant, de telles méthodes correspondent à une solution dans laquelle le signal désiré est de forme connue. Par conséquent, leurs applications supposent qu’on dispose simultanément de données a priori sur le signal et le bruit, ce qui n’est pas toujours le cas. Dans la séquence de traitement des données sismiques, la reconnaissance et l’élimination du bruit par les différentes techniques de filtrage restent un défi majeur. Malgré les progrès significatifs effectués au cours de ces dernières années, les performances des filtres proposés sont encore loin d’éliminer totalement le bruit, notamment dans les conditions d’acquisition des données sur des structures géologiques complexes.
Dans ce travail, nous proposons d’utiliser le réseau de neurones artificiel (RNA) pour filtrer les données sismiques. L’utilisation du RNA est motivée par sa capacité à extraire des informations utiles à partir de données hétérogènes ou imprécises. De plus, le modèle RNA permet d’approximer des relations arbitraires complexes non linéaires et d’obtenir une fonction de transfert. L’accent sera mis sur l’aptitude du RNA à l’apprentissage et à la généralisation sur des données synthétiques et réelles de sismiques réflexions.
RNA et ses applications
Un réseau de neurones artificiel (RNA) est constitué de neurones élémentaires (« agents »), connectés entre eux par l’intermédiaire de poids jouant le rôle de synapses [11]. L’information est portée par la valeur de ces poids, tandis que la structure du réseau de neurones ne sert qu’à traiter cette information et à l’acheminer vers la sortie (Fig. 1a). Le concept du neurone est fondé sur la sommation pondérée du potentiel d’action qui lui parvient des neurones voisins ou du milieu extérieur (Fig. 1b). Le neurone s’active suivant la valeur de cette sommation pondérée. Si cette somme dépasse un seuil, le neurone est activé, puis transmet une réponse (sous forme de potentiel d’action) dont la valeur est celle de son activation. Si le neurone n’est pas activé, il ne transmet rien [3,4]. Un RNA est généralement constitué de trois couches. La première couche représente l’entrée ; la seconde, dite couche cachée, constitue le cœur du réseau de neurones ; la troisième représente la couche de sortie (Fig. 1a). Un réseau de neurones fonctionne en deux temps : (1) il détermine d’abord ses paramètres suivant un algorithme d’apprentissage (conception) qui fait appel généralement à la rétropropagation du gradient conjugué [10,12], (2) puis il est appliqué comme fonction de transfert.
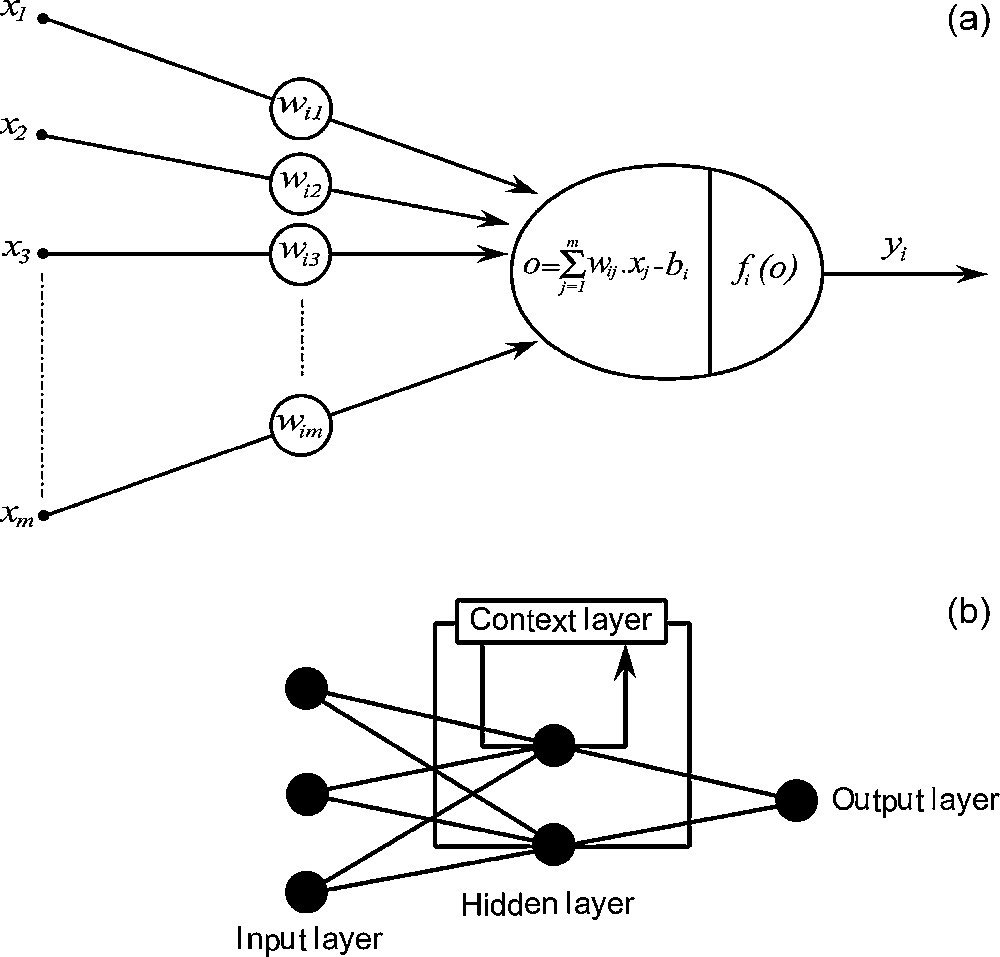
Architecture of an artificial neuron and a multilayered feedback neural network. (a) Artificial neuron. (b) Multilayered artificial neural network.
Fig. 1. Configuration d’un neurone artificiel et un réseau de neurones artificiel à connexion récurrente. (a) Neurone artificiel. (b) Réseau de neurones artificiels multicouches.
Applications
Nous avons d’abord essayé d’entraîner un réseau de neurones de type « connexion directe » (feed-forward), sans succès par manque de convergence de la rétropropagation. Calderión-Macías et al. [2] ont mentionné que le RNA de type feed-forward, utilisant la rétropropagation seule, ne peut converger ; ils ont adopté un apprentissage hybride par la technique du recuit simulé pour entraîner ce genre de réseau. Dans ce travail, nous avons choisi un RNA de type Elman (Fig. 1b) (connexion récurrente) pour le filtrage des données sismiques. Ce type de RNA possède une couche spéciale appelée « couche de contexte » [5], qui copie l’activité des neurones de la couche cachée ; les sorties des neurones de la « couche de contexte » sont utilisées en entrée de la couche cachée. Il y a alors conservation de la trace des activités internes du réseau sur un pas de temps. L’intérêt de ces modèles réside dans leur capacité à apprendre des relations complexes à partir de données numériques [11]. Les fonctions d’activation de la couche cachée de la structure proposée sont de type sigmoïde, permettant au RNA de se comporter comme un réseau non linéaire dans la transformation qu’il réalise. L’algorithme de rétropropagation du gradient conjugué est utilisé pour entraîner la structure neuronale proposée [2,7].
Données synthétiques
Étant donné que l’objectif de cette phase de simulation est le filtrage des données sismiques des bruits aléatoires et gaussiens par RNA, un modèle de subsurface de six couches à stratification horizontale a été utilisé (Tableau 1). Le sismogramme utilisé pour l’apprentissage du RNA ne simule que l’onde P, calculée à incidence normale. Sur la base de ce modèle, une section sismique a été calculée par convolution avec une impulsion de Ricker de fréquence centrale 20 Hz ; les trajets sont calculés suivant le principe de Snell–Descartes [6].
La section sismique utilisée comme sortie désirée du RNA dans la phase d’apprentissage est donnée sur la (Fig. 2a). Remarquons que les simulations ont été réalisées sous Matlab, qui n’accepte pas d’indice négatif ou nul pour les distributions de vitesses, engendrant ainsi un décalage temporel pour la première couche qui démarre à 0 ms. Les graphes de la (Fig. 2b et d), qui représentent l’entrée du RNA, sont obtenus respectivement par l’addition de 50 % de bruit aléatoire et gaussien à la section sismique précédente (Fig. 2a). Nous avons réalisé des tests en présence de 10 % de bruit aléatoire et gaussien (Tableau 2a et b), mais nous ne présentons ici que les résultats venant de l’addition de 50 % de bruit. Le nombre d’itération a été fixé à 4000, avec un critère d’arrêt (Tableau 2a). La section sismique filtrée par RNA après apprentissage respectivement pour le bruit aléatoire (Fig. 2c) et gaussien (Fig. 2e) est compatible avec le modèle de sortie désiré (Fig. 2a). Mis à part quelques traces dans lesquelles le bruit gaussien (Fig. 2e) a été réduit, le filtrage par RNA est plus efficace dans le cas d’un bruit aléatoire. Dans un exemple de performance obtenue (Fig. 2f) pendant la phase d’apprentissage avec 10 neurones (Tableau 2a et b) dans la couche cachée, l’erreur correspond à l’erreur cumulée, calculée par comparaison de la sortie RNA avec la sortie désirée. La performance avec 4000 itérations prédit une erreur croissante quand le nombre de neurones augmente. On remarque que la convergence est plus rapide lorsqu’on a affaire à du bruit aléatoire (Fig. 2f). Si l’on compare les Fig. 2c et e, la qualité du filtrage est meilleure dans le cas du bruit aléatoire.
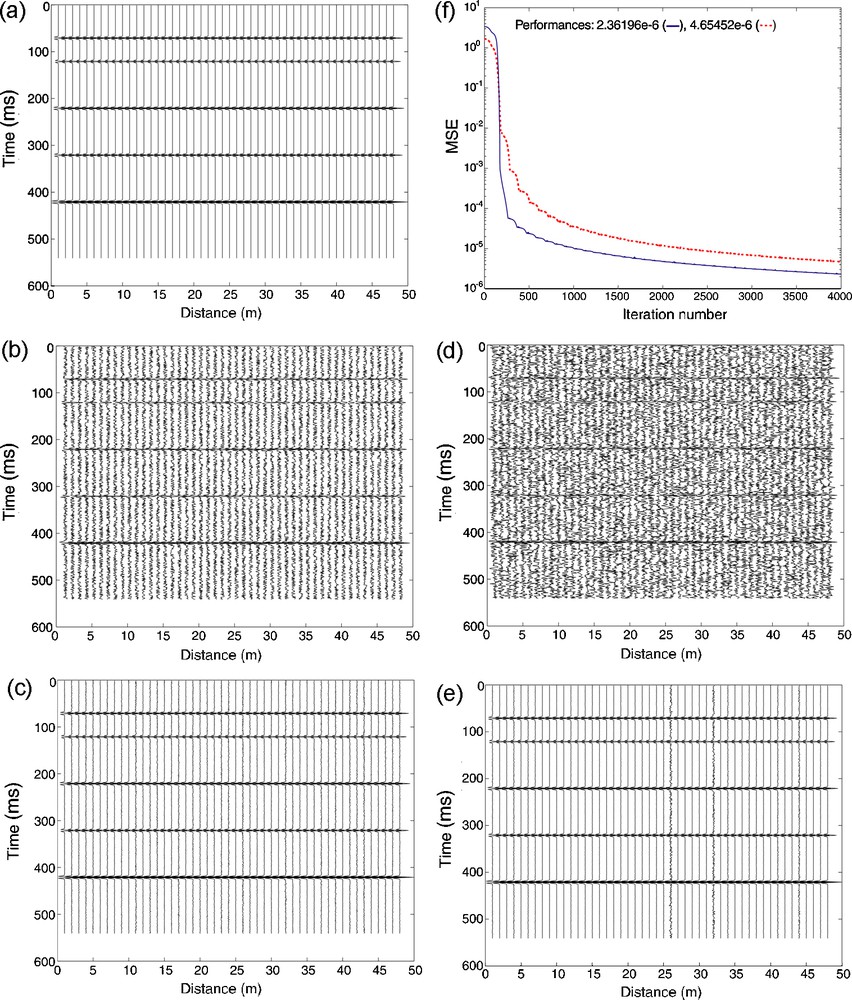
Training on synthetic data. (a) Used model (see Table 1), considered as desired output. ANN input (same section as in (a) with 50% of random (b) and Gaussian (d) noise respectively with their ANN output after training (c,e). (f) Mean square error (MSE) vs. number of iterations for a training stage. The full (dashed) line curve corresponds to 50% of added random (Gaussian) noise.
Fig. 2. Apprentissage sur données synthétiques. (a) Modèle utilisé (voir Tableau 1), considéré comme sortie désirée. Entrée du RNA (même section qu’en (Fig. 2a) avec 50 % de bruit aléatoire (b) et gaussien (d) et leur sortie du RNA respectivement après apprentissage (c,e). (f) Erreur quadratique moyenne en fonction de nombre d’itérations, dans la phase d’apprentissage. Courbe pleine (en tiretés) correspondant à 50 % de bruit aléatoire (gaussien) ajouté.
Données réelles
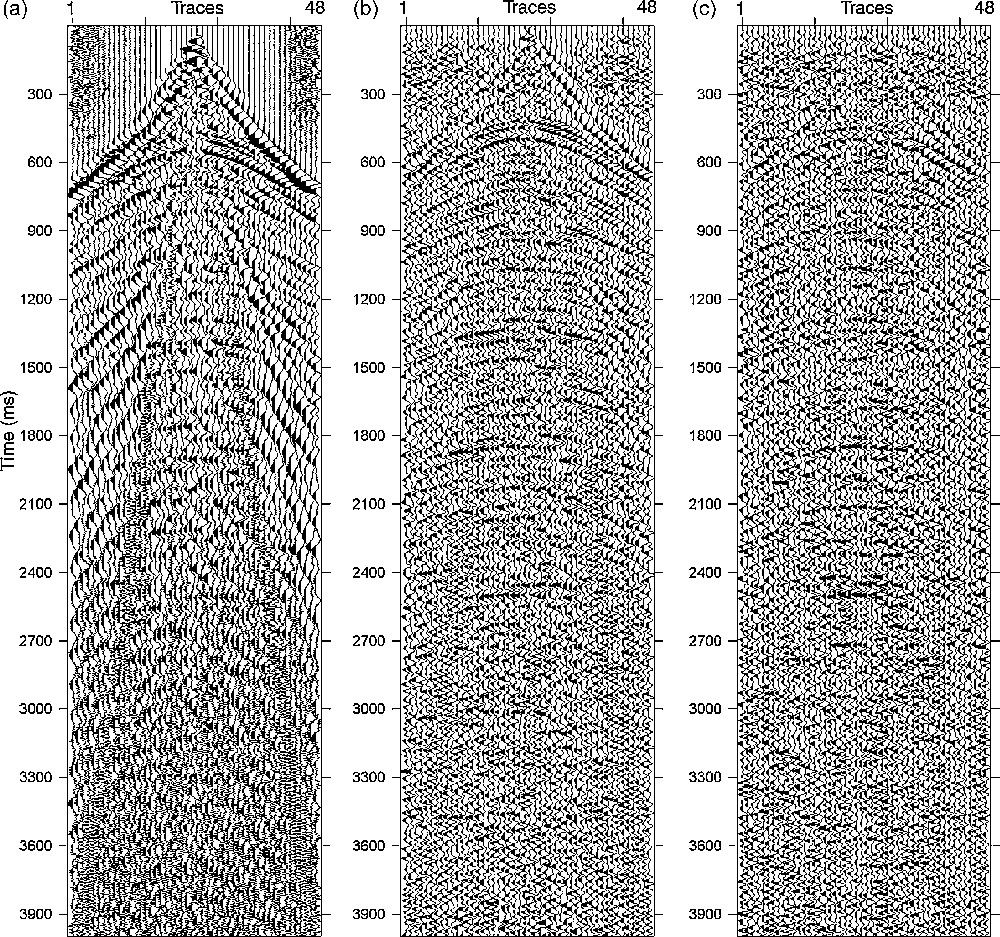
Deux types de données ont été préparés par filtrage dans le domaine spectral, sous forme de couples constitués d’entrée (traces d’un point de tir) et de sortie désirée (traces filtrées), l’un pour réaliser l’apprentissage et l’autre pour tester le réseau obtenu et déterminer ses performances. Les données d’apprentissage (Fig. 3a), composées d’une collection de 48 traces à 2000 échantillons par trace, traitées en amplitudes égalisées, contiennent plusieurs types de bruits (bruits aléatoires, arrivées directes, réfractées, des ondes de surface…), qui ont été filtrés dans le domaine (f–x) (Fig. 3b), pour fournir au RNA un exemple représentatif de bruits qu’il doit apprendre à identifier et à atténuer.

(a) Full shot gathers. Input of ANN. (b) Corresponding filtered shot gather, which is the desired output for the ANN in the training phase. (c) The performance obtained during the training phase. (d) Output of ANN in the training test. Rn: random noise, Dw: direct wave, Rw: refracted wave, Gr: ground roll.
Fig. 3. (a) Point de tir. Entrée du RNA. (b) point de tir filtré correspondant qui représente la sortie désirée du RNA. (c) Performance obtenue pendant la phase d’apprentissage. (d) Sortie du RNA dans le test d’apprentissage. Rn : bruit aléatoire, Dw : onde directe, Rw : onde réfractée, Gr : onde de surface.
Plusieurs essais d’apprentissage ont été réalisés (Tableau 2c). Les performances obtenues montrent la simplicité d’apprentissage de ce type de RNA par l’algorithme de rétropropagation du gradient conjugué et sont donc satisfaisants (cf. Fig. 3c).
Deux tests ont ensuite été réalisés. Le premier, qui est un test d’apprentissage, a été accompli en utilisant les données d’apprentissage (Fig. 3d) pour constituer la sortie du réseau après apprentissage, en lui présentant les traces bruitées utilisées dans cette phase. En comparant la sortie du réseau après apprentissage (Fig. 3d) avec les données bruitées (Fig. 3a), on remarque la reproductibilité de la sortie désirée (Fig. 3b) par l’atténuation du bruit. Le second est un test de généralisation. Dans ce cas, le deuxième modèle de données (Fig. 4a) constitue l’entrée du RNA entraîné, tandis que les données filtrées dans le domaine (f–x) (Fig. 4b) sont la sortie désirée, que l’on comparera à la sortie du RNA. Nous avons obtenu une section sismique (Fig. 4c), où l’on observe l’atténuation du bruit si on la compare à la section filtrée donnée dans la Fig. 4b, qui est le résultat attendu. Des horizons peuvent être isolés dans la partie supérieure de la section ( < 1200 ms), où le filtrage était effectif : réduction des zones énergétiques ( < 400 ms), atténuation des ondes de surface, des arrivées directes et réfractées à différents niveaux.
(a) Full shot gather. Input of the ANN. (b): corresponding filtered shot gather which is the desired output of ANN during the generalisation test. (c): output of ANN during the generalization test. Same notations as in Fig. 3.
Fig. 4. (a) Point de tir. Entrée du RNA. (b) Point de tir filtré, qui correspond à la sortie désirée du RNA pour le test de généralisation. (c) Sortie du RNA pendant le test de généralization. Mêmes notations que sur la Fig. 3.
Conclusion
L’apprentissage du RNA constitue un moyen de synthétiser automatiquement une fonction de transfert non linéaire entre les données bruitées et les données filtrées, qui permet au RNA de se comporter comme un filtre. Le RNA de type Elman offre l’avantage de simplicité d’apprentissage par la rétro-propagation du gradient conjugué.
La parfaite concordance entre la sortie du RNA en phase de généralisation et la section filtrée, résultat attendu, témoigne de la réussite de la structure neuronale proposée en phase de généralisation. Ces résultats obtenus démontrent clairement la faisabilité de la méthode, ainsi que l’intérêt d’exploiter la capacité de filtrage des données sismiques offerte par l’utilisation de l’approche neuronale.
1 Introduction
The filtering of noise is one of the crucial steps in a data processing sequence, especially in the light of the complexity of observations and the interference of noise types. Noise occurs not only during the initial phase of data acquisition from different sources (e.g., instrumental, natural) and processing related to techniques of sampling and methodology of filtering, but can also be visible in the final document. Methods used to attenuate the noise operate either by exploiting physical properties that differentiate noise from signal, such as apparent velocity, wave number, travel time… by the use of filtering algorithms, or by predicting the noise through modelling techniques [8,9,13]. Such predicted noise will be subtracted from the recorded seismic data. However, such methods correspond to a solution when the desired signal is of a known shape. Consequently, their application simultaneously assumes a priori information on signal and noise. Such information can be a minimum phase analytical signal (e.g., Ricker) that we usually use for seismic for instance.
In spite of significant progress regarding the performance of the proposed filters, we are still far from reducing the noise completely either from synthetic or real data. So far there is no noise attenuation technique that works universally in all acquisition data. Therefore, recognizing and removing the noise remains one of the great challenges in signal processing. The method proposed in this paper is an attempt to filter the noise by means of the artificial neural network (ANN). The use of ANN is motivated by its remarkable ability to extract useful information from heterogeneous or inaccurate data. Moreover, the ANN can approximate arbitrary complicated non-linear relationships and get a good non-linear transfer function. The emphasis is placed on the capacity of the ANN for training and generalization.
We will first address the ANN by means of several tests performed on synthetic and real seismic shot data, then make an adequate cross-validation and compare the quality of filtering at different stages of training and generalization. Filtering by means of Elman's ANN has not yet been applied to the seismic processing sequence.
2 Artificial neural network principles and its application
An ANN is an information processing paradigm that is inspired by the way biological nervous systems, such as the brain, process information. The most basic element of the human brain is a specific type of cell, which provides us with the ability to remember, think, and apply previous experiences to our every action [11]. These cells are known as neurons. The power of the brain comes from the number of these basic components and the multiple connections between them. The key element of this paradigm is the novel structure of the information processing system. It is composed of a large number of highly interconnected processing elements (neurons) working in unison to solve specific problems [4]. Each neuron is linked to certain of its neighbours with varying coefficients of connectivity that represent the strengths of these connections [3]. Each neuron transforms all signals that it receives into an output signal, which is communicated to other neurons. For example, the artificial neuron i multiplies each input signal by the connection coefficient wi, and adds up all these weighted entries in order to obtain a total simulation. Using an activation function f (or transfer function), it calculates its activity at the output, which is communicated to the following neurons (Fig. 1a).
Neurons are grouped into layers. In a multilayer network, there are usually an input layer, one or more hidden layers and an output layer (Fig. 1b). The layer that receives the inputs is called the input layer. It typically performs no function on the input signal. The network outputs are generated from the output layer. Any other layers are called hidden layers because they are internal to the network and have no direct contact with the external environment. The ‘topology’ or structure of a network defines how the neurons in different layers are connected. The choice of the topology to be used depends closely on the properties and the requirements of the application.
2.1 Artificial neural network's training
The most widely used training method is known as back-propagation method. This latter produces a least-square fit between the actual network output and desired results by computing a local gradient in terms of the network weights [12]. The design of neural network models capable of training originates in the work of the neurophysiologist Hebb [11]. Let us start from the simplest and best-known of facts: the neurons are connected to each other by synapses. Hebb made the assumption that the force of a synapse increases when the neurons it connects act in the same way at the same time. Conversely, it decreases when the neurons have different activities at the same time. Consequently, the intensity of this force varies, more or less, according to the simultaneous activity of each interconnected neuron. A learned form will correspond to a state of the network in which certain neurons will be active while others will not. It is the same principle which is applied to artificial neuron training. All the neurons that are connected to each other constitute a network. When one presents to the network a form to be learned, the neurons simultaneously enter into a state of activity that causes a slight modification of the synaptic forces. What follows is a quantitative reconfiguration of the whole of the synapses, some of them becoming very strong (high value of synaptic force), and the others becoming weak. The learned pattern is not directly memorized at an accurate location. It corresponds to a particular energy state of the network, a particular configuration of the activity of each neuron, in a very large range of possible configurations. This configuration is supported by the values of the synaptic forces [10,12].
Let
| (1) |
| (2) |
With each example, one has to modify the connection weights so that we may drastically reduce the value of e. The modification of the connection weights is carried out using the following relation:
| (3) |
| (4) |
Weights and threshold terms are first initialized to random values [2]. In general, there are no strict rules for determining the network configuration for optimum training and prediction.
2.2 Seismic data filtering
One can model the seismic signal by means of the following equation [6,8,9]:
| (5) |
3 Applications
Because a three-layered neural network could approximate any arbitrary complex on-linear relationship, we unsuccessfully tried to train feed-forward ANN; this failure was due to the non-convergence of the back-propagation. Calderión-Macías et al. [2] mentioned that feed-forward ANN using back-propagation alone could not converge; they used hybrid training by very fast simulated annealing technique to train this kind of network. In the present study, we adopted a three-layered feedback architecture of neural network (Fig. 1b), which is of Elman network type. It is one hidden layer with feedback connection from the hidden layer output to its input that constitutes the context representation layer. This feedback loop allows Elman networks learning to recognize and generate temporal or spatial patterns. This internal looping ensures a recirculation of information inside the hidden layer of this Elman ANN. In fact, the delay in this connection stores values from the previous time step, which can be used in the current time step [5]. In networks of this type, the hidden layer is activated simultaneously by the input layer and the context layer. The result of the processing of this hidden layer at its output is communicated to output of Elman ANN and will be stored in the context layer. By analogy with human brain thinking, this delayed information leads to hesitations before the making of a final decision by a human brain.
The activation functions of the hidden layer are of sigmoid type, given by the following equation [2,3]:
| (6) |
This function can produce outputs with a reasonable discriminating power and is a differentiable function that is essential for the back-propagation of errors. The number of neurons in the hidden layer depends on the desired optimum performance, which could be selected on a trial and error basis.
All further simulations and applications on real data were performed under the Matlab environment.
3.1 Synthetic data set
As an application of the method described above, we designed a synthetic subsurface model that is 500 m wide and 500 m deep. The main goal of this phase of simulation is to train the Elman ANN to filter seismic data from random and Gaussian noise in which subsurface consists of six homogeneous horizontal layers. A linearly increasing velocity structure is given with interval velocities varying with depth from 1200 m s−1 to 4000 m s−1 (Table 1). The synthetic seismograms used for network training include only P-wave primary reflections computed at normal incidence. Using this model, a set of trace gathers was computed using convolution equation (5), for which ray paths are computed by the Snell–Descartes’ law. The convolved seismic wavelet corresponds to a Ricker wavelet with a central frequency of 20 Hz. The synthetic seismic section used as the desired output of the ANN in the training phase is shown in (Fig. 2a). We may notice that Matlab does not agree with index lower or equal to zero for the velocity distributions, generating thus a temporal shift for the first layer beginning with 0 ms. In the input of the ANN (Fig. 2b), the previous seismic section (Fig. 2a) was mixed with 50% of random noise. We also did tests on synthetic data with additional 10% of random and Gaussian noise (Table 2a and b), but here we represent and discuss only results coming from 50% of noise. The ANN with different numbers of neurons in the hidden layer was trained using the back-propagation algorithm [2], with an iteration number of 4000 (Table 2a).
Simulation parameters used to generate the training data for ANN
Tableau 1 Paramètres de simulation utilisés pour générer les données d’apprentissage du RNA
| No. of layer | Velocity (m s−1) | Thickness (m) |
| 1 | 1200 | 30.6 |
| 2 | 1700 | 42.5 |
| 3 | 2100 | 105 |
| 4 | 2700 | 135 |
| 5 | 3200 | 160 |
| 6 | 4000 | 200 |
Results of training on synthetic data with random (a) and Gaussian (b) noise and on real data (c)
Tableau 2 Résultats de l’apprentissage sur des données synthétiques avec bruit aléatoire (a), gaussien (b) et sur des données réelles (c)
| Percentage of noise | Number of neurons in the hidden layer | Number of iterations | Performance |
| (a) | |||
| 10% | 10 | 4000 | 1.66204 × 10−6 |
| 15 | 4000 | 3.84408 × 10−6 | |
| 20 | 4000 | 6.30692 × 10−6 | |
| 25 | 4000 | 9.92197 × 10−6 | |
| 30 | 4000 | 1.39624 × 10−5 | |
| 50% | 10 | 4000 | 2.36196 × 10−6 |
| 15 | 4000 | 2.87078 × 10−5 | |
| 20 | 4000 | 4.60794 × 10−5 | |
| 25 | 4000 | 4.98179 × 10−5 | |
| 30 | 4000 | 8.00859 × 10−5 | |
| (b) | |||
| 10% | 10 | 4000 | 1.66596 × 10−6 |
| 15 | 4000 | 3.63946 × 10−6 | |
| 20 | 4000 | 6.33773 × 10−6 | |
| 25 | 4000 | 9.83710 × 10−6 | |
| 30 | 4000 | 1.09455 × 10−5 | |
| 50% | 10 | 4000 | 4.65452 × 10−6 |
| 15 | 4000 | 9.39854 × 10−6 | |
| 20 | 4000 | 9.50304 × 10−6 | |
| 25 | 4000 | 1.39683 × 10−5 | |
| 30 | 4000 | 2.83009 × 10−5 | |
| (c) | |||
| 50 | 4000 | 368.4620 | |
| 60 | 1201 | 2.33044 × 10−08 | |
| 70 | 794 | 1.77530 × 10−08 | |
| 80 | 648 | 6.17601 × 10−08 | |
| 90 | 573 | 1.09518 × 10−08 |
In an example of obtained performance, during the training phase with 10 neurons (Table 2a and b) in the hidden layer ((Fig. 2f), the plotted error corresponds to the accumulated errors obtained by comparing the filtered shot gather (namely the desired output) with the network output. Two criteria to arrest the calculation are adopted: if the performance is around 10−6 or if the number of iterations is 4000. Different tests were then performed with different numbers of neurons in the hidden layer; the prediction error increases as the number of neurons grows if we keep 4000 iterations. One can notice that the performance curve for random noise converges more quickly than that for the Gaussian noise ((Fig. 2f). If we compare both diagrams in Fig. 2c and e, the quality of filtering is better on random noise.
The result of filtering the seismic section by the ANN after training is shown in (Fig. 2c). The obtained seismic section by ANN after training (Fig. 2c) is compatible with the seismic model, which is also the desired output (Fig. 2a). When we add 50% of Gaussian noise to our model (Fig. 2d); one can see that the obtained section using ANN after training (Fig. 2e) is similar to the seismic model (Fig. 2a). We therefore demonstrated that the ANN technique clearly improved the seismic section, even if some noise with reduced amplitude still remains.
The ANN technique was also applied using the same procedure, with the same model, to filter Gaussian noise at different rates of noise, respectively 10% and 50%. The example in which 50% of Gaussian noise was added to the seismic section reveals that, in the second (∼120 ms) and the fourth (∼320 ms) horizons, the signal-to-noise ratio is weak. According to our model, i.e. for a constant rate of noise (here 50%), when the velocity contrasts are lower, the signal-to-noise ratio is weaker, and conversely. The result of ANN application (Fig. 2e) is in agreement with the model itself (Fig. 2a). It shows, apart from a few traces where the noise has been reduced significantly, a similarity with the model that can be distinguished (Fig. 2a). Comparing this result with the one obtained with 50% of random noise, we can conclude that better filtering is efficient in presence of random noise.
3.2 Real seismic data
The three following steps must be given chronologically if we wish to implement the use of ANN technique to filter real seismic data.
3.2.1 Data preparation
In order to implement the ANN to filter seismic data, two sets of models are used. The first model is used to train the proposed network structure, while the second one is used to test whether the network can filter the new data using the derived weights. The seismic data used in this study were extracted from a survey of an oil field in the South of Algeria. Each model, which constitutes a shot gather recorded using a Vibroseis source and a 48-trace recorder with a shift of 20 m for the source and receivers, was processed with equalized amplitudes. The sampling rate is 2 ms and each trace contains arrivals between 100 ms and 4000 ms. In order to prepare the data for training, each shot was subjected to an FFT, its frequency components were analyzed on the x direction. If the events recorded within the analyzed traces show coherent aligned signals, the horizontal frequency will be regular along the x direction. Deviations from such regular coherency are caused by the presence of noise. A predictive operator is built in the x direction to reduce the effect of noise by horizontalizing the coherent events. Such an operation will isolate the noise from the signal; it will be removed easily by subtraction from the original data. Finally, the result will be given in the temporal domain through an inverse FFT algorithm. As an example, one can see that the shot gather (Fig. 3a) shows different kinds of noise (random noise, direct and refracted waves, ground roll), which are reduced significantly by application of such a filtering procedure (Fig. 3b). The projective filter in the (f–x) domain separates the signal, assuming that it is predictable in x, from non-predictable noise within all the frequency spectra. We note that the ground roll has been severely reduced, direct and refracted waves were also filtered so that the first horizons can be easily identified between 400 and 900 ms (Fig. 3b). We may also notice that energetic waves were also reduced before 200 ms. We distinguish different levels of reflections between 200 and 500 ms. Some horizons are also detected, for instance at around 1300 and 1800 ms (Fig. 3b), even if they were lacking or presenting a very low signal-to-noise ratio in the original data (Fig. 3a).
3.2.2 Training phase
The shot gather selected from the training set (Fig. 3a) together with the filtered one (Fig. 3b) is used as the desired output of the ANN in the training phase. Since the efficiency of any network application depends mainly on the database used for training and testing the network, the training data set should contain all the possible noise types that can appear in the field.
The ANN with different numbers of neurons in the hidden layer was trained using the back-propagation method. Weights were randomly initialized and the learning rate is at 0.05 [10,11], the number of neurons in the hidden layer is 50, 60, 70 and 90, and the generalization performance is reported in Table 2c. All networks were trained for an identical maximum number of iterations (4000). The performance obtained during the training phase with 60 neurons in the hidden layer is shown in Fig. 3c. Tests performed with different numbers of neurons in the hidden layer show that the prediction error decreases as the number of neurons grows, if we keep 4000 iterations (Table 2c).
However, final training errors are similar if we deal with a number ranging between 60 and 90 neurons in the hidden layer. For 50 neurons, the performance is not really accepted.
To test the learning ability of the proposed ANN structure, we conducted tests on its capability to produce outputs for the set of inputs that were used in the training. The result obtained is shown on section of Fig. 3d. If we compare the output of the network (Fig. 3d) after the training, using the noisy shot gather (Fig. 3a), with the filtered one (Fig. 3b), one can easily notice that the network behaves like a filter. It significantly reduced several types of noise (random noise, direct and refracted waves, ground roll). The network fits the training data accurately and the 60 neurons in the hidden layer are therefore able to perform the task of training satisfactorily.
3.2.3 Generalization phase
Once the training is carried out, i.e. the architecture and the activation functions, the synaptic weights of the network are fixed, the obtained network is used like a classical non-linear function. Now that we have tested the network obtained on the training data, it is important to see what it can do with new data, not mentioned before. If this ANN does not give reasonable filtered outputs for this test set, the training period is not achieved. Indeed, this testing is critical to ensure that the network has not simply memorized a given set of data, but has learned the task of data filtering.
The test for its generalization ability is carried out by investigating its capability to filter the new data that were not included in the training process. In this study, for a test network generalization, we plotted output sets and desired outputs of data that were chosen for this stage of network development. To test the trained ANN, new data were used with some noisy events (Fig. 4a). One can see that the noise is attenuated on the obtained output ANN (Fig. 4c). In this case, the trained network is said to have a good generalization performance.
Let's compare both ANN output in the generalization phase (Fig. 4c) and the obtained filtered section (Fig. 4b), which is the desired ANN output, using the previous procedure in data preparation. Isolated horizons can be seen mostly in the upper part of the section (< 1200 ms), where filtering was effective: reduction of energetic areas (< 400 ms), attenuation of direct and refracted waves and ground roll at different levels.
4 Conclusion
In this work, the neural networks of Elman type were addressed to filter seismic data. The results show that networks could establish relationship between noisy and filtered traces, based on their ability of approximation and adaptation. The training of the network can be considered as a means to synthesize automatically a function (control mapping), generally a non-linear one, which plays a role of filter.
In our case, the learning ANN algorithm used a steepest descent technique that is based on straight downhill in the weight space till the first valley is reached. This makes the choice of an initial starting point in the multi-dimensional weight space critical. To overcome this limitation, the training process was repeated a number of times with different starting weights. The excellent results indicate that training of this network was done successfully, and the Elman network has the ability to obtain strict convergence for a complicated set of data in case of filtering of seismic data. Moreover, the method is able to reproduce features that were not included in its training set. In fact, based on the results of the ability of generalization, the application of the ANN technique in a same seismic exploration area produced reasonable signal-to-noise ratio on data sets that were not learned.
Several tests were performed with synthetic data in the presence of two kinds of noise (random and Gaussian) with rates of 10% and 50%. The results show that the used ANN structure (i.e. Elman type) was able to recognize and reduce the noise. The same results were also obtained on real seismic data.
We think that feedback neural networks, with their ability to discover input–output relationships will increasingly be used in engineering applications, especially in petroleum engineering, usually associated with intrinsic complexity. The results obtained demonstrate that the neural network can detect several types of noise in data contaminated by multiple events classified as noise (e.g., direct and refracted waves, ground roll, random noise) and reduce them significantly.
The main advantage of using ANN for filtering seismic data is that once the ANN has been trained, it has the ability to quickly filter new data.
Acknowledgements
We thank both the two anonymous referees who suggested some remarks that have allowed us to improve the final version of the manuscript.