

Abridged English version
The present article aims at developing new methods to automatically detect and identify objects on ground from their spectral signature in satellite images. The data bank kindly provided by S.L. Aster (Aster, 1998, 2009) three contributions from Jet Propulsion Laboratory (JPL) Spectral Library (Baldridge et al., 2009), Johns Hopkins University (JHU) Spectral Library and United States Geological Survey (USGS) Spectral Library (Clark et al., 2007) includes over 2300 spectra from various natural and artificial objects covering the wave length range 0.4 to 15.4 μm.
Corrections have been made to each pixel value to take into account atmospheric absorption. Then, the response of the various channels of SPOT (XS), IRS-1 C (LISS), LANDSAT (TM) and ASTER (VNIR, SWIR and TIR) for different object classes have been calculated by convolving the class spectrum with the transmission spectral shape of the channel filters. The results are shown in Fig. 1.
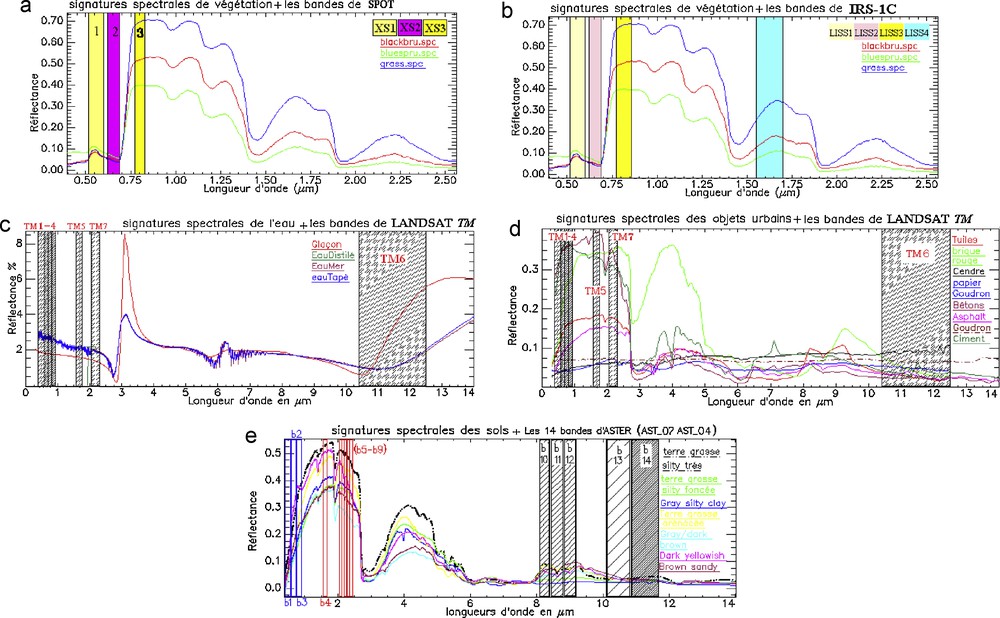
Calcul de la réflectance dans les bandes spectrales par convolution avec les courbes de transmission des capteurs utilisés : a : les bandes XS de SPOT ; b : les bandes LISS de IRS-1 C ; c, d : les bandes TM de LANDSAT ; e : les 14 bandes du capteur ASTER.
Computing reflectance in satellite bands by convolution with sensors transmission functions: a SPOT XS bands; b IRS-1 C LISS bands; c, d LANDSAT TM bands; e ASTER bands.
The rules used for attributing each pixel to a certain class have been improved, taking into account successive data treatments. Fig. 2 depicts the results obtained when processing a SPOT image with the “BASESPOT 4” set of rules. It shows some confusion between bare and covered soils, farming areas and various vegetation densities. This confusion has been eliminated by using the Normalized Difference Vegetation Index (NDVI) (Kriegler et al., 1969) in a new set of rules “BASESPOT 7” (Fig. 3).
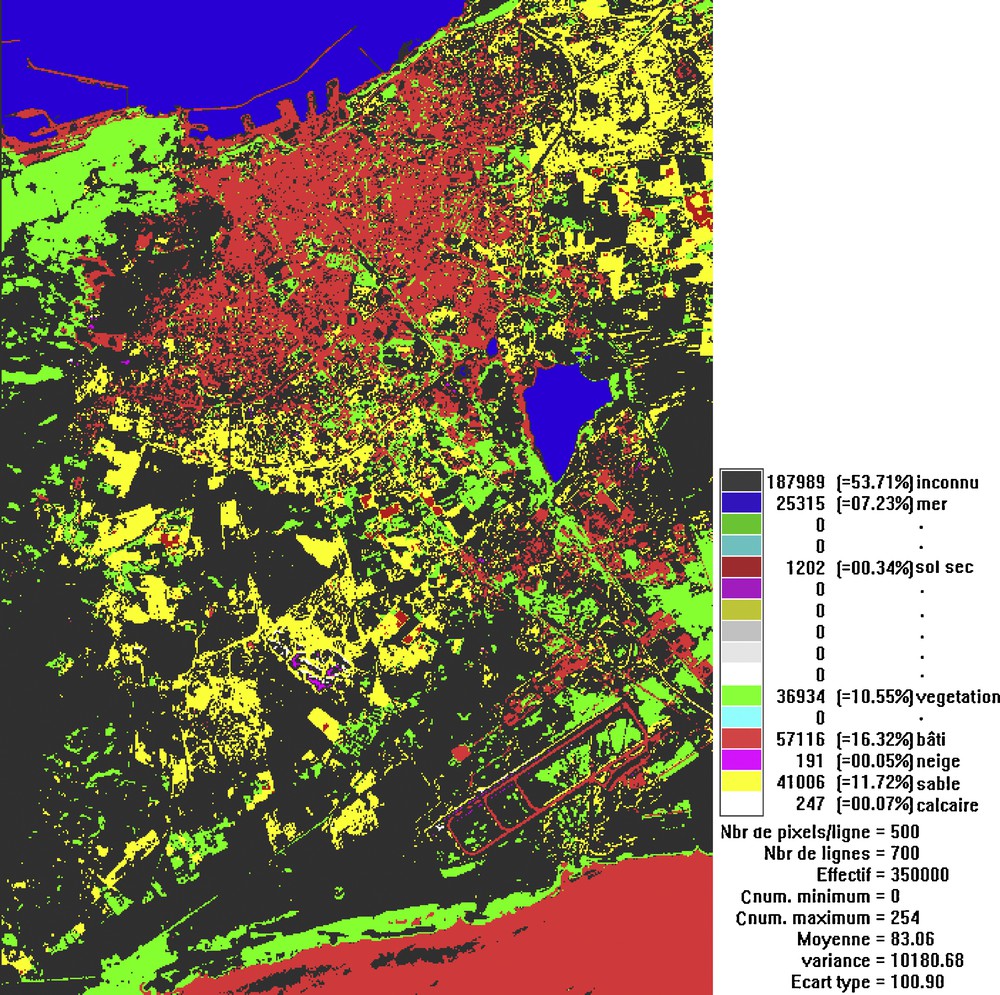
Résultat du traitement PCSATWIN 3.1 d’image SPOT par une Base de Règles sans l’indice de végétation NDVI, BASESPOT 4.
PCSATWIN 3.1 treatment results of the SPOT image without introducing vegetation index NDVI, BASESPOT 4.
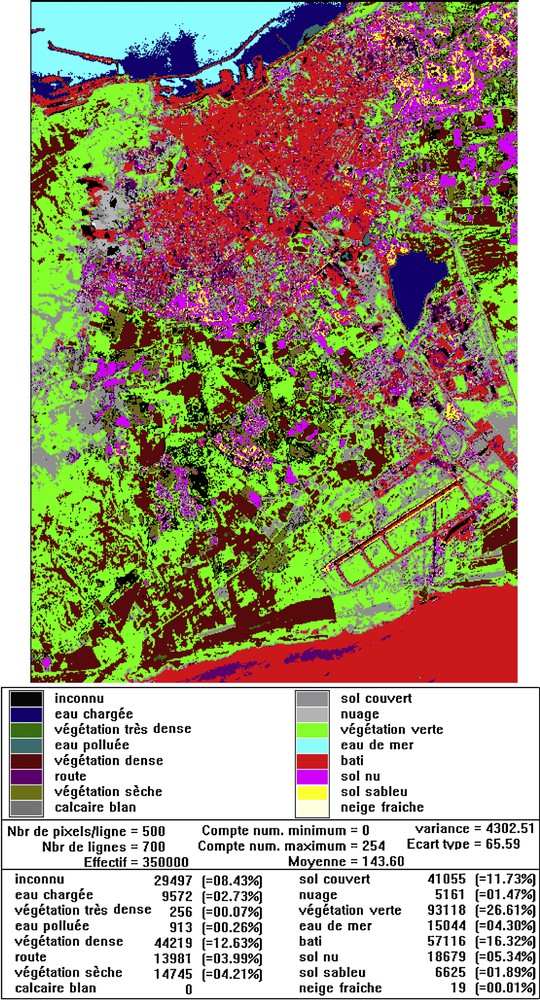
Résultat de la classification de la même image SPOT par BASESPOT 7 en introduisant l’indice de végétation NDVI.
BASESPOT 7 classification results of the same Spot image by introducing vegetation index NDVI.
Using a topographic map of the Oran area and actual ground surveys, the results have been shown satisfactory for towns and roads. Table 1 shows how the results are improved by a larger numbers of rules.
The statistics of results obtained by classification “BR” following the selected number of rules.
| Nombre de règles | 7 | 11 | 12 | 13 | 15 | 15 |
| Nom de BR | BaseSpot 4 | BaseSpot 5 | BaseSpot 6 | BaseSpot 6.1 | BaseSpot 7 | BaseSpot 7 |
| Dimension d’image (pixels) | 500 × 400 | 500 × 400 | 500 × 400 | 500 × 400 | 500 × 400 | 500 × 700 |
| Non classés (%) | 53,71 | 48,50 | 29,70 | 23,17 | 08,40 | 08,43 |
| Eau de mer (%) | 07,23 | 07,52 | 07,52 | 07,59 | 07,52 | 04,30 |
| Eau polluée (%) | – | 00,45 | 00,45 | 00,45 | 00,45 | 00,26 |
| Eau chargée (%) | – | 04,79 | 04,85 | 04,79 | 04,79 | 02,73 |
| Calcaire blanc (%) | 00,07 | – | 00 | 00 | 00 | 00 |
| Sol sablé (%) | 11,72 | 02,63 | 02,63 | 02,63 | 02,63 | 01,89 |
| Sol nu (%) | 00,34 | 05,77 | 05,77 | 01,76 | 05,77 | 05,34 |
| Sol couvert (%) | – | 04,33 | 04,33 | 04,33 | 13,19 | 11,73 |
| Végétation sèche (%) | – | 12,67 | 12,67 | 12,67 | 06,75 | 04,21 |
| Végétation verte (%) | 10,55 | 05,50 | 17,57 | 17,57 | 17,57 | 26,61 |
| Végétation dense (%) | – | 01,22 | 07,89 | 07,89 | 07,89 | 12,63 |
| Végétation très dense (%) | – | – | – | 00 | 00,07 | 00,07 |
| Bâtis (%) | 16,32 | 06,57 | 06,57 | 17,10 | 17,10 | 16,32 |
| Route (%) | – | – | – | – | 6,89 | 03,99 |
| Nuage (%) | – | – | – | – | 00,96 | 01,47 |
| Neige fraiche (%) | 00,05 | 00,04 | 00,04 | 00,04 | 00,01 | 00,01 |
| Nombre de pixels classés | 92 560 | 102 980 | 140 600 | 153 640 | 183 180 | 320 460 |
| Nombre total de pixels | 200 000 | 200 000 | 200 000 | 200 000 | 200 000 | 350 000 |
| Total classée (%) | 46,28 | 51,49 | 70,30 | 76,82 | 91,59 | 91,56 |
These results have been checked against those obtained by the Spectral Angle Mapping (SAM) method which determines the similarity of the observed spectrum and the spectrum of the object class considered by computing the angle between the two corresponding vectors in a N dimension space, N being the number of frequency bands. The SAM method applied to the same SPOT image with the spectral profiles shown in Fig. 4, leads to the results depicted in Fig. 5.
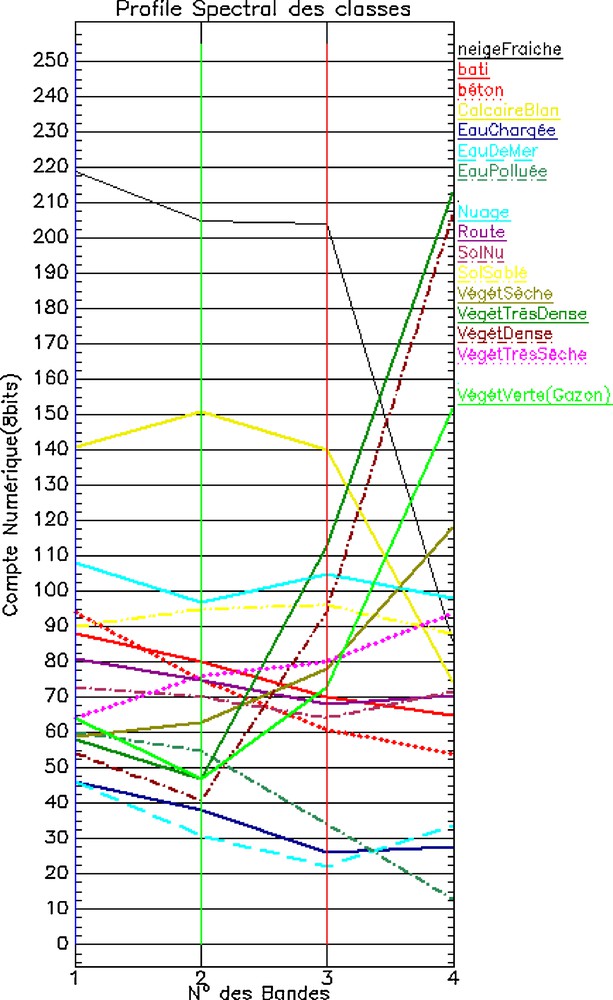
Profils spectraux des classes dégagées par BASESPOT 7, utilisés comme les spectres des vecteurs cibles dans la méthode SAM.
The spectral profiles of the classes identified by BASESPOT 7 used as target vectors spectra in SAM method.
Résultat du traitement de la même image SPOT par SAM, utilisé pour la comparaison avec le résultat de la méthode Base de Règles (BR).
SAM Classification results of the same SPOT image for comparison with BR method results.
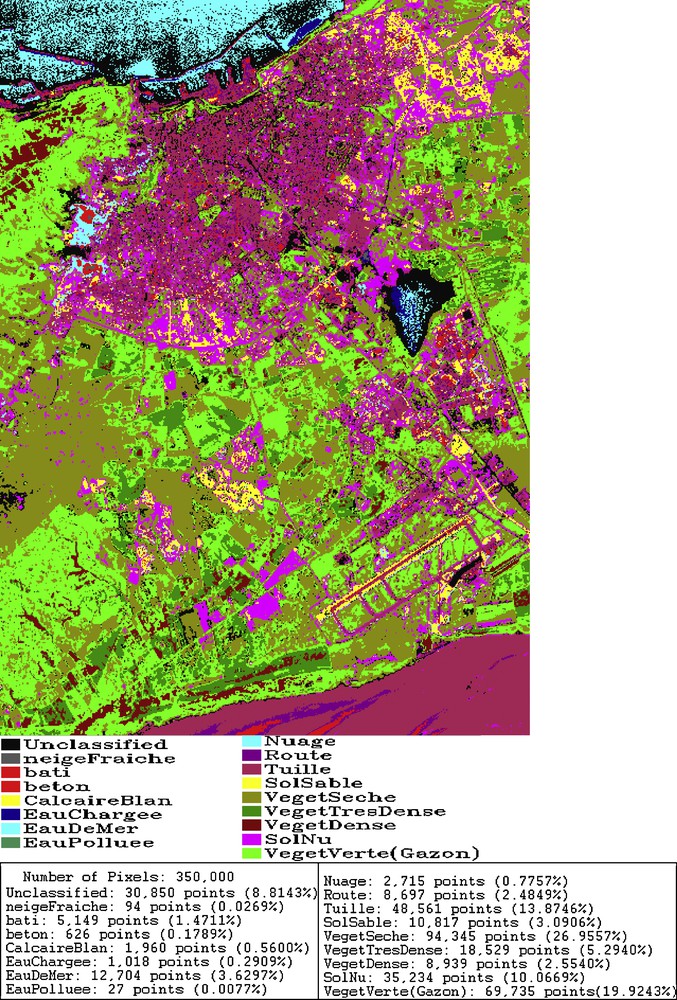
A typical map of the Oran area, obtained through the “BASESPOT 7” treatment on a 500 × 500 pixel SPOT image, is shown in Fig. 6.
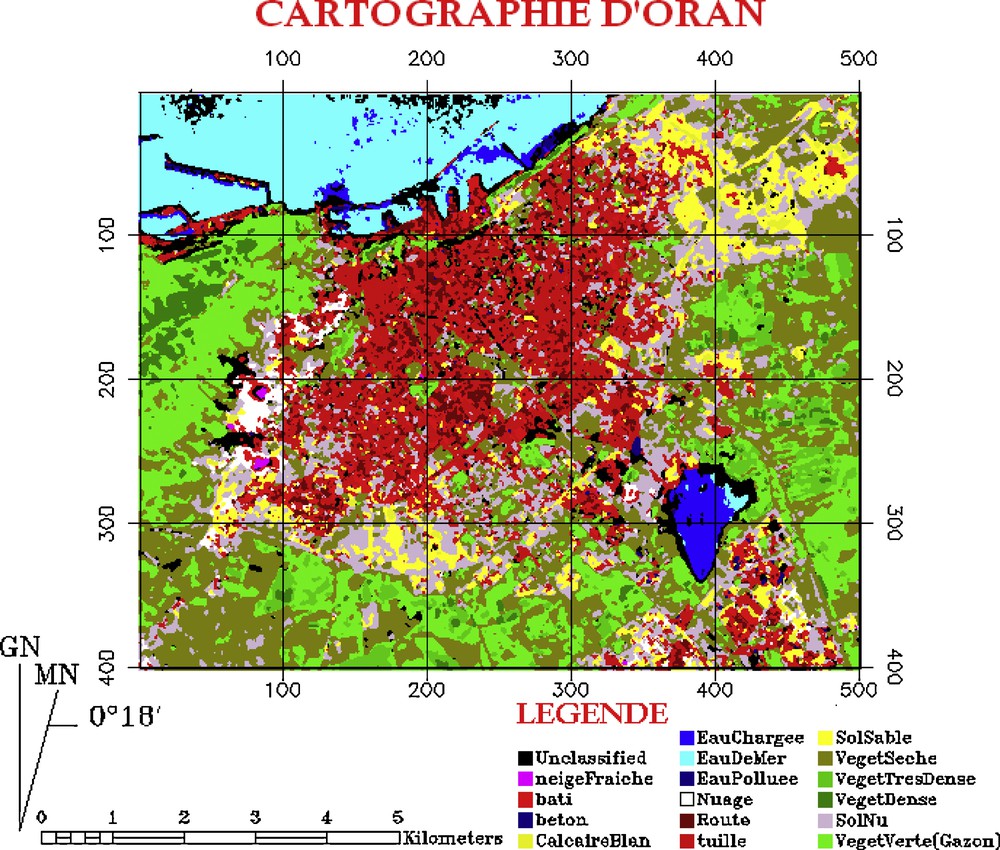
Exemple d’une cartographie de la région d’Oran réalisée par le résultat du traitement BASESPOT 7 sur une image (500 × 500) pixels de SPOT.
Example of Oran region mapping performed by BASESPOT 7 classification results of SPOT image (500 × 500) pixels.
The conclusion summarizes the relative merits of the two methods (see Table 5) and sets the perspective for a mineral mapping of some Algerian regions.
The comparison of results obtained by the two classifications BR and SAM.
| Classes | Nombre de pixels classés | % | Remarque | ||
| BR | SAM | BR | SAM | ||
| Végétation verte | 93 118 | 69 735 | 26,61 | 19,924 | |
| Sol nu | 18 679 | 35 234 | 5,34 | 10,066 | |
| Végétation dense | 44 219 | 8939 | 12,63 | 2,554 | |
| Végétation T-dense | 256 | 18 529 | 0,07 | 5,294 | |
| Végétation sèche | 14 745 | 94 345 | 4,21 | 26,955 | |
| Sol sablé | 6625 | 10 817 | 1,89 | 3,090 | |
| Route | 13 981 | 8697 | 3,99 | 2,485 | |
| Nuage | 5161 | 2715 | 1,47 | 0,776 | |
| Eau polluée | 913 | 27 | 0,26 | 0,007 | Très bien classé par 1 |
| Eau de mer | 15 044 | 12 704 | 4,30 | 3,630 | Bien classé pour les 2 |
| Eau chargée | 9572 | 1018 | 2,73 | 0,291 | Très bien classé par 1 |
| Calcaire blanc | 00 | 1960 | 00 | 0,560 | |
| Béton | – | 626 | – | 0,178 | |
| Bâtis | 57 116 | 5149 | 16,32 | 1,471 | |
| Tuile | – | 48 561 | 13,874 | ||
| Neige fraiche | 19 | 94 | 0,01 | 0,027 | |
| Non classés | 29 497 | 30 850 | 8,43 | 8,814 | |
| Total | 350 000 | 350 000 | 100 |
1 Introduction
La multiplication des capteurs à très haute résolution spatiale et spectrale est une véritable opportunité pour l’identification des objets en milieu urbain et périurbain. Dans ce domaine, plusieurs auteurs se sont intéressés à l’amélioration des connaissances sur l’environnement urbain, par l’intégration des règles fondées sur des critères spectraux, géométriques et contextuels (Puissant et al., 2006). D’autres se sont penchés sur l’amélioration des anciennes méthodes de classifications, supervisées par l’intégration de règles statistiques dans l’apprentissage semisupervisé (Vatsavai et Bhaduri, 2010).
Le but de notre travail est l’élaboration de nouvelles méthodes automatisées, fondées sur un ensemble de règles de base pour la détection et l’identification des objets au sol, à partir des images satellitaires. Nous nous sommes intéressés à l’utilisation des signatures spectrales et à tout ce qu’elles peuvent contenir comme informations utiles (Clark, 1999), pour pouvoir classifier les objets identiques. Suivant les bandes spectrales des images satellites utilisées et sans aucun apprentissage, nous avons établi des règles de sélections de plus en plus précises, jusqu’à l’obtention de classes bien distinctes que nous avons pu confirmer avec la réalité du terrain.
Au départ, nous avons rassemblé une banque de données de signatures spectrales, que nous avons exploitées suivant deux méthodes différentes. La première (Base de Règles [BR]) programmée dans le logiciel « PCSATWIN » (Benabadji et al., 1997, 2003a). Elle consiste à classer les pixels dans des classes qui obéissent à une BR (Benabadji et al., 2003b), suivant des profils spectraux et les images satellites utilisées (BASESPOT, BaseLANDSAT & BaseIRS). À l’aide de la seconde méthode (SAM), nous avons comparé les résultats obtenus par la BR (Tableau 4). Des cartographies d’occupation du sol à différentes résolutions spatiales pour la région d’Oran ont été réalisées.
2 Méthodes et procédures
Le site de notre étude est situé au Nord-Ouest de l’Algérie. Géographiquement, la région d’Oran (0° 35’ W, 35° 50’N, environ 75 km2) est limitée au Nord et Nord-Ouest par la Méditerranée et du Sud-Ouest au Sud-Est par la chaîne montagneuse de Tassala.
La banque spectrale utilisée est constituée de données en format numérique (fichiers TXT) fourni sur deux CDs ROM par la Librairie Spectrale d’Aster (Aster Spectral Library, 1998, 2009). Cette librairie est la collection et la contribution de trois sous-librairies de données dans un format standard tirées de Jet Propulsion Laboratory (JPL), Spectral Library (Baldridge et al., 2009), Johns Hopkins University (JHU), Spectral Library et United States Geological Survey (USGS), Spectral Library (Clark et al., 2007). Cette bibliothèque englobe plus de 2300 spectres de différents objets naturels et fabriqués sur une gamme de longueur d’onde allant de 0,4 à 15,4 μm.
Les informations sur les types d’images utilisées dans ce travail et leurs dates d’acquisition sont portées dans le (Tableau 1).
The data used in this work.
| Capteurs utilisés | Dates de prise de vue | Nombre d’images | Résolution spatiale |
| SPOT couvrant la région d’Oran jusqu’à les montagnes de Tassala | 5 mai1986 | Deux images | 20 mètres |
| 20 mars 1995 | |||
| IRS-1 C | 4 avril 1997 | Une image | 20 mètres |
| LANDSAT | 1993 | Deux images | 30 mètres sauf TM6 120 mètres |
| 1995 | |||
| ASTER (AST_07 & AST_04) | octobre 2000 à août 2004 | Six images | VNIR 15 m |
| SWIR 30 m | |||
| TIR 90 m | |||
| Carte géographique et aéronautique | 1988 et 2000 | Deux cartes | 1: 500 000 1: 200 000 |
Peut-on trouver une méthode simple automatisée pour classer les pixels suivant leurs propriétés spectrales sans aucune information préalable et sans tenir compte du voisinage, de position ou de forme? Pour cela, nous avons procédé à la classification des pixels suivant une multitude de sélections, selon la forme que peut prendre la réponse spectrale des objets bien définis : c’est la méthode à BR. En se basant sur la banque des signatures spectrales déjà mises en service, notre méthode consiste à poser un ensemble de règles tirées des diagrammes spectraux des objets existants au sol, suivant les bandes spectrales du capteur utilisé et faire une classification supervisée. Au lieu de se fonder sur la perception humaine, nous nous sommes basé sur les mesures simulées en utilisant des règles statistiques de comparaison entre les comptes numériques corrigés en réflectance, pour les différentes images multispectrales. Les résultats de cette combinaison sont mis sous forme d’un ensemble de tests hiérarchiques que nous avons introduit dans le logiciel « PCSATWIN » conçu sous Windows pour le traitement des images satellites (Benabadji et al., 1997, 2003b).
2.1 Correction atmosphérique des données
À partir d’une banque de signatures spectrales et des coefficients d’extinction, nous avons procédé à des corrections atmosphériques suivant un code numérique qui permet de suivre le signal solaire dans son double trajet soleil-sol et sol-capteur (Benabadji, 2006; Mahrrar, 2001).
En se basant sur la relation de forme linéaire entre la luminance (L) captée et le compte numérique (CN) :
| (1) |
Le calcul de ces coefficients s’effectue par le choix des pixels de plusieurs thèmes faciles à identifier dans les mêmes conditions de prise de vue.
La simulation de la luminance observée des pixels choisis se fait à l’aide du logiciel simulation des données satellitaires (SDDS) (Bachari et al., 2001a; Mahrrar, 2001). La même méthode a été directement appliquée sur les comptes numériques des images pour obtenir la reflectance moyenne () :
| (2) |
Les coefficients a et b calculés pour les enregistrements LANDSAT TM 1993 et Spot XS 1986 sont présentés dans le (Tableau 2). Ce qui nous permet de calculer l’éclairement global G d’une surface horizontale :
| (3) |
Example of a and b coefficients calculated for SPOT 1986 LANDSAT TM et 1993.
| SPOT | LANDSAT | ||||||
| XS1 | XS2 | XS3 | TM1 | TM2 | TM3 | TM4 | |
| a | 0,0153 | 0,0053 | 0,0032 | 0,0018 | 0,0034 | 0,0026 | 0,0036 |
| b | –0,6544 | –0,1466 | –0,0609 | –0,1023 | –0,0760 | –0,0427 | –0,0300 |
Le passage des CN des images brutes à celles corrigées, peut être reformulé par l’Éq. (3).
2.2 Classification par la méthode « Base de Règles »
Après le calibrage des données en réflectance, nous avons calculé les réflectances des classes recherchées dans les bandes des instruments (XS) de SPOT, (LISS) de IRS-1 C, (TM) de LANDSAT et (VNIR, SWIR et TIR) d’ASTER par convolution des signatures spectrales avec les courbes de transmission des filtres de ces instruments (Escadafal et al., 1993; Laoufi et al., 2005) illustré par la (Fig. 1).
Pour chaque capteur utilisé, nous avons posé des bases de règles dans un fichier TXT (ASCII) nommés « BASESPOT », « BaseLANDSAT », « BaseIRS-1C » et « BaseASTER », afin de les introduire dans les traitements.
Le modèle syntaxique des règles intégré dans le logiciel PCSATWIN est décrit par une séquence de procédés à satisfaire (Benabadji et al., 2003a, b, c) :
- • une BR : qui englobe un ensemble de règles produites pour chaque capteur utilisé ;
- • une base de faits : constituée d’une structure de données représentant les mesures ;
- • un interprète : ou moteur d’inférence, contrôlant l’activité du système.
Une règle quelconque doit respecter la syntaxe suivante :
- • SI expression 1 (Ci) test expression 2 (Cj) ;
- • ET ……. Idem …. ;
- • ALORS conclusion.
Où : l’expression (Ci) : est une fonction mathématique d’une ou plusieurs variables Ci
- • Ci : compte numérique d’un pixel du canal i (CN = 0, 1… 255 pour le codage 8 bit et calibré en réflectance) ;
- • i : numéro du canal i de l’image satellite traitée.
- ∘ i = 2, 3 ou 4 (cas de SPOT/XS et IRS-1 C) ;
- ∘ i = 1, 2, 3, 4, 5, 6 ou 7 (cas de LANDSAT/TM) ;
- ∘ i =2, 3… 14 ou 15 (cas d’ASTER) [17].
- • test : est l’un des symboles de comparaison suivantes : < > = # ;
- • conclusion : désigne l’un des thèmes relevé dans le diagramme des signatures spectrales (classe choisie).
Pour garder une certaine homogénéité des constantes Ci, nous avons posé des valeurs à i d’après les domaines spectraux des bandes (Tableau 3) (Laoufi et al., 2005).
Indexing Ci according to the data used.
| C 1 | C 2 | C 3 | C 4 | C 5 | C 6 | C 7 | C 8 | C 9 | C 10 | C 11 | C 12 | C 13 | C 14 | C 15 | |
| Spot | XS1 | XS2 | XS3 | NDVI | |||||||||||
| IRS1 C | LIS1 | LIS2 | LIS3 | NDVI | |||||||||||
| ASTER | VNIR1 | VNIR2 | VNIR3 | SWIR4 | SWIR5 | SWIR6 | SWIR7 | SWIR8 | SWIR9 | TIR10 | TIR11 | TIR12 | TIR13 | TIR14 | |
| LANDSAT | TM1 | TM2 | TM3 | TM4 | TM5 | NDVI | TM7 | – | – | – | – | – | – | TM6 |
3 Résultats et discussions
Après plusieurs traitements, nous avons pu améliorer ces bases de règles et par conséquent la classification.
Au départ, nous avons programmé PCSATWIN pour seulement sept canaux (version 3.0) (Benabadji et al., 2003a). Cet algorithme n’est valable que pour sept constantes (Ci) allant de un à sept. Dans ce cas, le nombre maximal des classes est limité à 16 suivant les 16 couleurs possibles dont le noir est réservé pour les pixels non classés.
3.1 Résultats de la classification
Nous présentons sur la Fig. 2 le résultat du traitement d’une image Spot Mars 1995, avec la BR « BASESPOT 4 ». La confusion entre les sols nus et couverts, les cultures et les différentes densités de végétations est bien constatée. Pour lever cette confusion et distinguer entre les différentes classes de végétations, nous avons fait recours à l’indice de végétation normalisé Normalized Difference Vegetation Index (NDVI) (Kriegler et al., 1969), donné par la formule suivante :
| (4) |
Nous avons calculé cet indice comme une image ratio (Bachari et al., 1997). Puis, nous l’avons ajouté comme une constante C5 pour les images SPOT et IRS-1 C et une autre constante C6, en remplaçant le canal TM6 par l’image NDVI apparent pour LANDSAT (Tableau 3). Ce qui a permis une amélioration appréciable de nos bases de règles.
L’introduction du NDVI était indispensable pour distinguer les différents types du sol et de végétation, qui apparaissent dans le résultat de traitement de la même image par la nouvelle BR « BASESPOT 7 » (Fig. 3).
À l’aide d’une carte topographique de la région d’Oran, issue de la carte d’Algérie (1988) au 1/500 000 et la réalité de terrain, nous avons validé les classifications, en ce qui concerne les zones d’agglomérations et le réseau routier. Cette méthode s’avère très gourmande en temps de calcul, ce qui nous a poussés à opérer des traitements sur des imageâtes (250 × 250 pixels) avant de les généraliser sur des images moyennes (500 × 700 pixels) et grandes.
Le Tableau 4 résume l’amélioration de la classification BR avec l’augmentation du nombre des règles (classes).
3.2 Comparaison des résultats
Dans le but de comparer nos résultats par rapport à ceux d’autres méthodes, nous avons fait appel à la méthode de classification supervisée Spectral Angle Mapper (SAM) qui consiste à calculer l’angle spectral entre les deux vecteurs pixel et cible. Le vecteur cible représente le profil spectral des régions d’intérêt, extrait de l’image (zone d’entraînement qu’on appelle ROI), ou bien directement de notre banque spectrale. Le vecteur pixel représente le profil spectral du pixel à classifier. Pour calculer cet angle, nous avons suivi l’algorithme SAM incorporé dans le logiciel ENVI 3.1 acquis par notre laboratoire.
Pour cette méthode aussi, nous avons utilisé les données calibrées en réflectance apparente. L’algorithme détermine la similitude spectrale entre deux spectres en calculant « l’angle spectral » entre eux l’équation (5) (Kruse et al., 1993), en les traitant comme des vecteurs dans un espace de dimension égale au nombre de bandes N.
| (5) |
Pour pouvoir comparer les résultats obtenus par les deux méthodes, nous avons appliqué la classification SAM sur la même image SPOT, en se basant sur les profils spectraux (Fig. 1) tirés des classes résultantes du traitement par la première méthode BR (Fig. 3) et d’autres tirés des zones d’apprentissage comme tuiles et béton. Le résultat du traitement est donné par la (Fig. 1). Pour la validation des résultats obtenus par cette méthode, nous avons utilisé la même carte topographique et la réalité de terrain.
Le Tableau 5 résume les pixels classés suivant chaque méthode. Nous remarquons qu’il y’a plus de précision par la méthode BR concernant la classification des eaux polluées et chargées et aussi la végétation verte et dense que la date de prise de vue de l’image utilisée est mars 1995. Or, la période de mars dans cette région est connue par sa végétation verte comme le gazon, les cultures et aussi pour sa végétation dense ; tous les arbres sont recouverts de feuilles vertes (Bachari et al., 2001b, 2004; Bianchin et Bravin, 2008; Puissant et al., 2006; Zeng et al., 2010). En revanche, la confusion remarquée pour les deux méthodes concerne le classement du sol de Sabkha, bâti pour la méthode BR et tuiles pour la méthode SAM. Dans le cas des pixels non classés, nous remarquons que notre méthode ne nous permet pas de classer l’ombre des nuages présents dans l’image par défaut de règles. Nous avons utilisé l’image avec et sans traitement atmosphérique. Ainsi, pour la méthode SAM, les pixels non classés concernent les trois types d’eaux, en plus des ombres des nuages.
Un exemple de cartographie de la région d’Oran réalisée par le résultat du traitement « BASESPOT 7 » sur une image (500 × 500) pixels de SPOT est donné par la Fig. 6.
4 Conclusion
Les résultats sont spécifiques pour chaque méthode ; ceux obtenus par la première méthode s’améliorent en augmentant le nombre des règles (Tableau 4) et le nombre de bandes spectrales. Bien que la méthode reste puissante, le temps du processus de classification est long, car il dépend de la taille de l’image traitée et des capacités d’espaces mémoires physique et virtuelle du PC. Ces bases de règles sont stockées au niveau du logiciel, dans le but de les réutiliser pour d’autres images du même capteur.
Le deuxième algorithme calcule l’angle entre le profil spectral de chaque pixel à identifier et celui d’une cible considérée, collecté à partir d’une librairie spectrale. Il augmente la précision des classes en minimisant l’angle spectral et en améliorant les choix des profils spectraux des cibles choisies. SAM est relativement peu sensible aux changements de l’illumination de Pixel, contrairement à la première méthode qui est plus précise en exploitant le maximum d’informations relatives à la réponse spectrale du pixel.
Comme perspective, nous envisageons la cartographie minéralogique de quelques régions de l’Algérie en utilisant l’identification automatisée des différents types de roches et minerais sur des images hyperspectrales.