


 CC-BY 4.0
CC-BY 4.0
1. Introduction
Modeling rain Drop Size Distributions (DSDs) is useful for several applications such as: (i) the quantitative estimation of rainfall by weather radars or by mobile telecommunication links; (ii) predicting the attenuation of satellite signals by rain; (iii) washing of atmospheric particles by rain; (iv) soil erosion by rain; etc. This modeling aims to parameterize the rain DSD by a minimum number of scale parameters that can be related to the meteorological variables observed by sensors—for instance radar reflectivity. Inspired by several previous works, Sempere-Torres et al. [1994, 1998] proposed a general single-moment normalization to formulate the DSD in terms of a scaling law. Later, based on the work of Testud et al. [2001], Lee et al. [2004] proposed a general double-moment normalization approach to the DSD. Using convective and stratiform DSD data, they showed that double-moment normalization better captures the natural variability of the DSDs than single-moment normalization. In terms of physical interpretation, the scaling exponent of the single-moment normalization has a marked dependence on the type of rain i.e., with microphysical processes inducing the raindrop formation, whereas in the double-moment normalization distinction between rain type is not necessary [Lee et al. 2004].
The analysis of the impact of DSD integration time step on their modeling began with the work of Chapon et al. [2008]. Recently, using single-moment normalization (scale parameter: rain intensity), Moumouni et al. [2021] highlighted the dependence of the shape function parameters of DSD models (gamma and lognormal) on the DSD integration time step. By fitting the individual spectra with unimodal DSD models (gamma and lognormal), they also showed that the overall proportion of well-fitted and very well-fitted spectra increases with the integration time step. The need to integrate DSD measurement in time (or space, with a network of disdrometers) is related to the very small sampling area of disdrometers [Tapiador et al. 2017] which leads to sampling error in individual spectra estimation. The amount of integration is a tradeoff between avoiding random errors due to sampling errors and the risk to smooth up too much the part of DSD variability that is related to microphysical processes (such as convective/stratiform).
For polarimetric radar, several authors [Bringi et al. 2003, 2006, Gorgucci et al. 2002, Gosset et al. 2010, Testud et al. 2001] have shown the importance of the double-moment normalization of the DSD. Indeed, the double-moment normalization of DSD provides an excellent model to reduce the DSD variability which strongly affects radar rain retrieval algorithms since this approach is quite effective in collapsing the DSDs around a mean shape. This work aims to analyze the impact of the DSD integration time step on their double-moment normalization. For this purpose, the double-moment normalization of the DSD approach, proposed by Lee et al. [2004], will be used and applied to DSD data measured in northern Benin [Moumouni et al. 2008, 2021]. Thus, the following sections will be devoted successively to the datasets, the method, the results and discussions, and the concluding remark.
2. Datasets
The DSDs data used for this study are those sampled in northern Benin, near the town of Djougou (9.66°N, 1.69°E)—using optical Disdrometers: single beam [Löffler-Mang and Joss 2000, Salles 1995, Salles et al. 1998] and double beam [Delahaye et al. 2005]—from 2005 to 2007, during the African Monsoon Multidisciplinary Analysis (AMMA) meteorological campaign. The climate of the study area is mainly characterized by a unimodal rainfall regime with April to October as period of the unique rainy season. The annual rainfall is about 1200 mm but is marked by a downward trend on the last decades. The DSDs data have been validated and widely used for several studies [Gosset et al. 2010, Kougbéagbédé et al. 2017, Moumouni 2009, Moumouni et al. 2008, 2018]. These data are DSDs of rains with an integration time step equal to one minute. They are made up of 93 rainy events which represent a total of: 11,647 spectra when only rain intensities greater than or equal to 0.1 mm⋅h−1 are considered; and 12,342 spectra for a threshold of to 0.05 mm⋅h−1. The selected rainy events are isolated at the level of each Disdrometer. A rainy event is defined as event with duration at least equal to 15 min and intermittency less than 30 min. The duration of the selected rainy events varies from 15 to 527 min.
From these data, Moumouni et al. [2021] computed other rain DSDs datasets of various integration time steps (Table 1). The DSDs duration T = L min (L = 1,2,3,4,…,20) were calculated within each event, and the remaining spectra whose number is less than L are not taken into account.
Datasets from a few integration time steps
| Data | DATA1 | DATA2 | DATA3 | DATA4 | DATA5 | DATA6 |
|---|---|---|---|---|---|---|
| Integration time steps | T = 1 min | T = 2 min | T = 5 min | T = 10 min | T = 15 min | T = 20 min |
| Number of spectra | 12,342 | 6152 | 2437 | 1198 | 777 | 578 |
| Cumulative (mm) | 1237.16 | 1236.89 | 1235.53 | 1225.94 | 1217.20 | 1216.79 |
3. Methods
Since the pioneering work of Marshall and Palmer [1948] on the rain Drop Size Distribution (DSDs), most of followed studies [Atlas et al. 1999, Cerro et al. 1997, Chen et al. 2019, Tenorio et al. 2012, Tokay and Short 1996, Uijlenhoet et al. 2003, Ulbrich 1983, Ulbrich and Atlas 1998, Wen et al. 2018, Willis 1984, Zeng et al. 2019, Zhang et al. 2003, etc.] analysed it with N(D) function defined by spectrum of a given period T (generally 1 min is used). The diameter of drop named equivalent diameter is the diameter of the sphere having the same volume as that of the measured drop. N(D) corresponds to the number of raindrops per unit of volume and by interval of diameters and is calculated as follows:
| (1) |
| (2) |
The measured moment of order n of a rain DSD spectrum (whatever the integration time steps) is defined [Chapon et al. 2008, Lee et al. 2004, Ochou et al. 2007, Sempere-Torres et al. 1994, Zeng et al. 2019] by
| (3) |
When we assume a DSD model, the theoretical moment of order n of a rain DSD spectrum (whatever the integration time steps) is defined [Chapon et al. 2008, Lee et al. 2004, Ochou et al. 2007, Sempere-Torres et al. 1994, Zeng et al. 2019] by
| (4) |
3.1. Double-moment normalization [Lee et al. 2004]
There are several variants of DSD normalization that can be summarized in two approaches: single-moment normalization and double-moment normalization. The single-moment normalization method was generalized by Sempere-Torres et al. [1994]. The double-moment approach was generalized by Lee et al. [2004]. The latter proved that the DSD can be normalized by any two of its reference moments (Mi and Mj, i≠j). This is how they linked the function N(D) to a the normalizing function which we named the shape function F(x) and to two parameters Dc and Nc (with x = D∕Dc), such that
| (5) |
| (6) |
| (7) |
When N(D) is expressed in (m−3⋅mm−1), we note that the moments of order nMmea,n or Mn are expressed in (m−3⋅mmn) and therefore the parameters Dc and Nc are expressed respectively in (mm) and (m−3⋅mm−1). Thus, the parameters Dc and Nc stand for the average size and the concentration of the drops in the DSD spectrum, respectively. When we introduce the expression (5) in (4), we get
| (8) |
| (9) |
| (10) |
The choice of the two reference moments depends on the use of DSD modeling. In the following, to facilitate the understanding of this modeling, we have chosen two reference moments of successive order by posing i = k and j = k + 1, with k⩾0 and k≠∞. Thus, the expressions (6), (7) and (10) become
| (11) |
| (12) |
| (13) |
3.2. Case of the gamma DSD model
The gamma DSD model proposed by Tokay and Short [1996] or Maki et al. [2001] is written
| (14) |
| (15) |
| (16) |
| (17) |
| (18) |
| (19) |
3.3. Case of the generalized gamma DSD model
Similarly to the gamma DSD model (14), the generalized gamma DSD model can be written in this form
| (20) |
| (21) |
| (22) |
| (23) |
| (24) |
| (25) |
∙ Comparison with the generalized gamma of Lee et al. [2004]
The generalized gamma DSD model proposed by Lee et al. [2004] is written as follows:
| (26) |
3.4. Case of the lognormal DSD model
The lognormal DSD model proposed by Feingold and Levin [1986] is written
| (27) |
| (28) |
| (29) |
| (30) |
| (31) |
| (32) |
3.5. Implementation of double-moment normalization
For each rain DSD integration time step, the double-moment normalization is implemented successively as follows:
- Calculation of the sample moments of order n with (3).
- Choice of two reference moments of order k and k + 1, then the calculation of the parameters Dc and Nc and of the average sample of Cn with the relation (8).
- Estimation of the parameters of each shape function. The constant Cn being used at the end of the modeling to estimate the moments, these sample will be used to estimate the parameters of the shape functions.
- For the gamma DSD model, the parameter 𝜇 is estimated by making a least-squares adjustment by comparing CG,n (19) with the sample of Cn calculated in the previous step.
- For the generalized gamma DSD model, the parameters 𝜈 and 𝜀 is estimated by making a least-squares adjustment by comparing CGG,n (25) with the sample of Cn calculated in the previous step.
- For the lognormal DSD model, the parameter 𝜎 is estimated by making a least-squares adjustment by comparing CL,n (32) with the sample of Cn calculated in the previous step.
- Calculation of the normalized spectra with the expression (5) then representation of these spectra and of the shape functions (gamma, generalized gamma and lognormal).
- Model evaluation: comparison of the estimated moments Mest,n (8) with the measured moments Mmea,n (3). In expression (8), the constant Cn is estimated for each model from the estimated values of the parameters of the shape functions: CG,n for the gamma model; CGG,n for the generalized gamma model; and CL,n for the lognormal model. For the comparison, the following statistical criteria were used:
In these expressions, E[⋅] denotes the sample mean.
4. Results and discussion
4.1. Results
The rain DSDs observed in northern Benin are modeled using the method above described. Data from the six integration time steps (Table 1) are used separately. For each integration time step, six different couples of moments (Mk, Mk+1) are used for normalization. The statistics of the parameters Dc and Nc, for each integration time step and for each couple of moments, are presented in Table A1 of the appendix. The average values of the constant Cn, for each integration time step and for each couple of moments, are presented in Table A2 of the appendix. The variation of these statistics between the couples of moments is obvious from expressions (11) and (12). Nevertheless, for a couple of moments, the variation of these statistics as a function of the integration time step is not obvious. This raises several questions: (i) are these statistics significantly different? (ii) if yes, what is this due to? These questions deserve to be addressed in our future work.
For the couple of moments (M3, M4), the result of the adjustment of the constant Cn, for each model, is represented in Figure 1. For the same couple of moments, the normalized spectra and the shape functions are represented in Figure 2. These figures show that each considered model fits well the DSDs observed in northern Benin. Figure 2 shows that: (i) the gamma and generalized gamma models seem to better model the mean distribution in the left tail; (ii) the three models seem to model the mean distribution in the same way in the intermediate region; (iii) the lognormal model seem to better model the mean distribution in the right tail. This description deserves to be deepened by first clarifying the importance of this mean distribution for the DSD modeling. Indeed, in this study, we adjusted the mean of the constant Cn instead of the mean distribution, because it is very useful for the estimation of the other moments from the reference moments (relation 10 and 13). Figure 1 shows that the constant Cn is better fitted by the generalized gamma model.

Fit of the constant Cn for each model (G is gamma: blue, GG is generalized gamma (noted G Gamma): green and LN is lognormal: red). The asterisk represents the sample mean and the error bar represents the standard deviation. 𝜌2 is the square of the linear Pearson correlation coefficient, between the sample mean and the model. Case of the couple of moments (M3, M4).
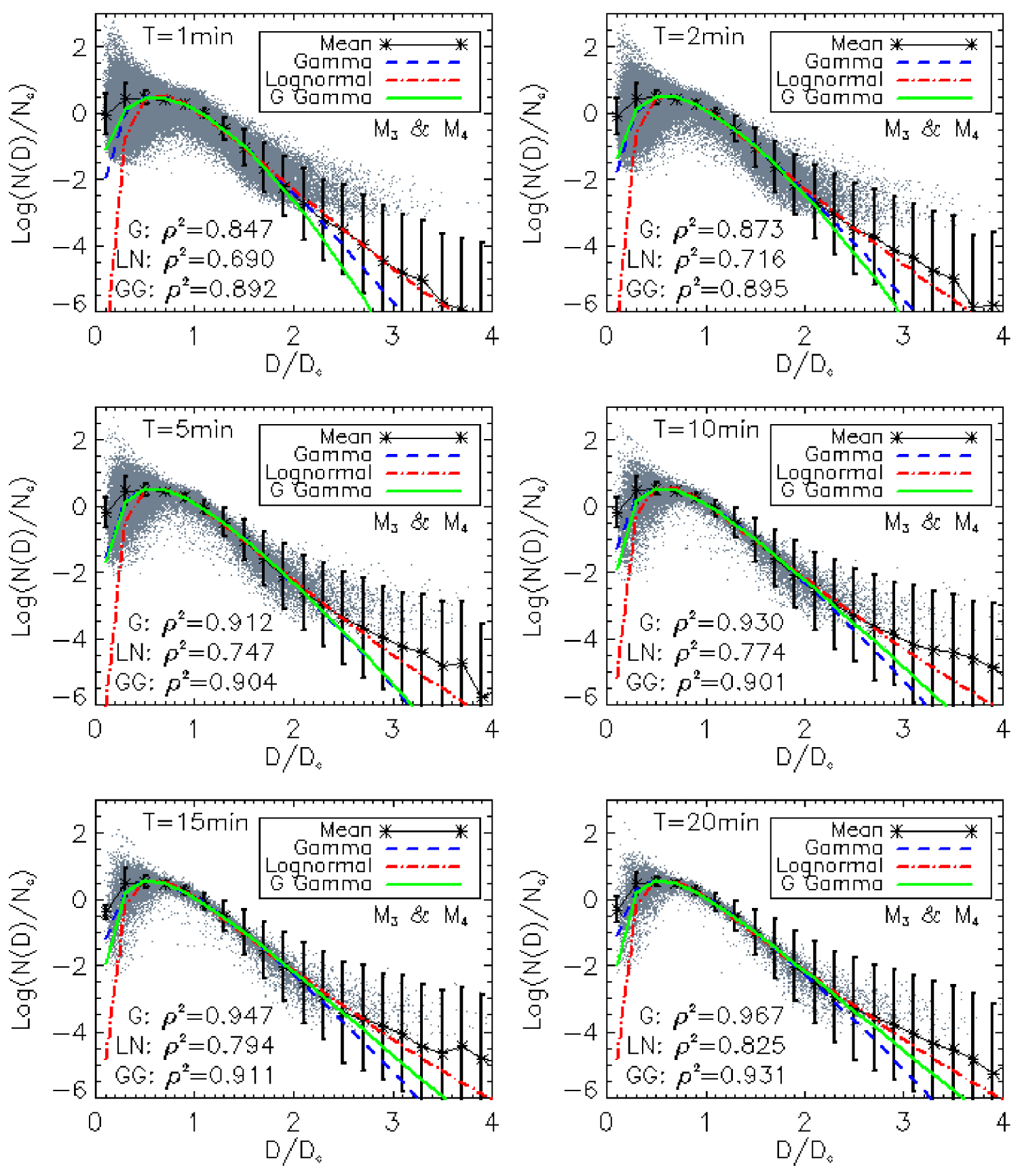
Normalized spectra (slate gray dots) and the shape functions of the models (G is gamma: blue, GG is generalized gamma (noted G Gamma): green and LN is lognormal: red). The asterisk represents the sample mean and the error bar represents the absolute value of standard deviation. 𝜌2 is the square of the linear Pearson correlation coefficient, between the sample mean and the model. Case of the couple of moments (M3, M4).
The importance of a DSD model being its ability to estimate from the reference moments its other moments, the three proposed models were evaluated. The result of this evaluation for the couple of moments (M3, M4) is shown in Figure 3. This result for the other couples of moments is shown in Figures A1 to A5, in the appendix. The SDFE indicates, for each couple of moments (Mk, Mk+1), whatever the integration time step, that the three models estimate the moments of order between k − 0.5 and k + 1.5 with almost null error. Nevertheless, this error becomes very significant outside this interval. The MRE indicates, for all couples of moments, that the estimate with the generalized gamma model is better than that of the other two models. Moreover, with the generalized gamma model, the MRE is almost independent of the integration time step, contrary to the case of the other two models.
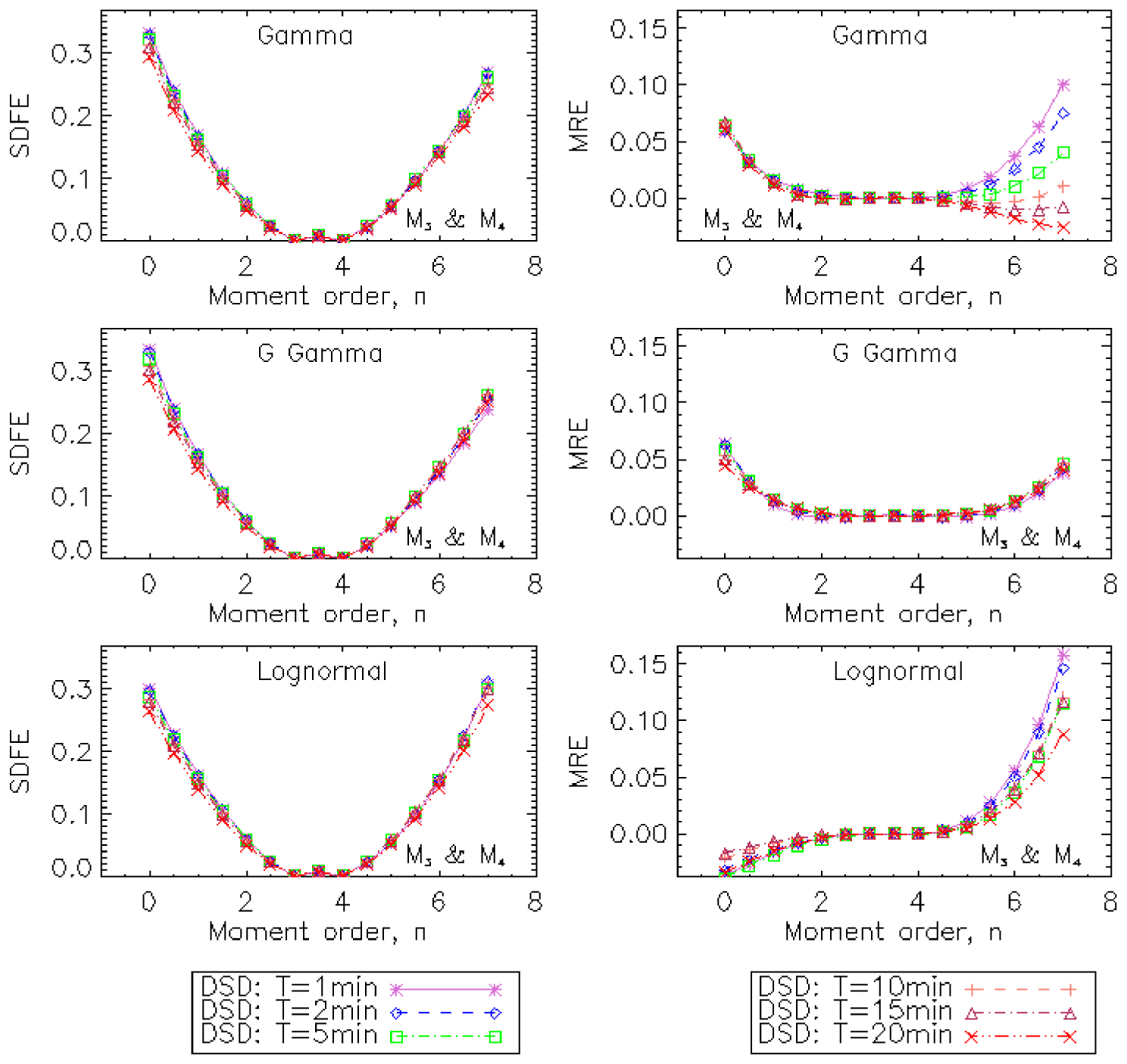
Comparison of moments estimated to moments measured with SDFE and MRE. Case of the couple of moments (M3, M4), relating to the DSD models gamma, generalized gamma (noted G Gamma) and lognormal.
The impact of the integration time step on the modeling is analyzed. The estimated parameters, for each integration time step and for each couple of moments, are presented in Table 2. For the couple of moments (M3, M4), these parameters are represented as a function of the integration time step in Figure 4. The relationships established for the six couples of moments are presented in Table 3. The parameters of the shape functions are therefore dependent on the integration time step, whatever the model and the pair of moments.
Parameters of the shape functions of the models. They are estimated for each integration time step and for each couple of moments
| T (min) | (M0, M1) | (M1, M2) | (M2, M3) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 𝜇 | 𝜈 | 𝜀 | 𝜎 | 𝜇 | 𝜈 | 𝜀 | 𝜎 | 𝜇 | 𝜈 | 𝜀 | 𝜎 | |
| 1 | 6.040 | 3.520 | 1.470 | 1.400 | 6.190 | 2.650 | 1.680 | 1.380 | 6.550 | 3.680 | 1.400 | 1.360 |
| 2 | 5.750 | 4.360 | 1.220 | 1.410 | 5.780 | 3.620 | 1.340 | 1.390 | 5.920 | 4.610 | 1.160 | 1.370 |
| 3 | 5.560 | 5.000 | 1.080 | 1.410 | 5.510 | 4.250 | 1.180 | 1.390 | 5.550 | 5.290 | 1.030 | 1.380 |
| 4 | 5.440 | 5.440 | 1.000 | 1.420 | 5.360 | 5.040 | 1.040 | 1.400 | 5.340 | 5.620 | 0.970 | 1.380 |
| 5 | 5.350 | 5.910 | 0.930 | 1.420 | 5.230 | 5.480 | 0.970 | 1.400 | 5.150 | 6.140 | 0.900 | 1.390 |
| 6 | 5.250 | 6.460 | 0.860 | 1.420 | 5.090 | 5.790 | 0.920 | 1.410 | 4.970 | 6.630 | 0.840 | 1.390 |
| 7 | 5.150 | 6.660 | 0.830 | 1.430 | 4.980 | 6.390 | 0.850 | 1.410 | 4.850 | 6.740 | 0.820 | 1.390 |
| 8 | 5.100 | 7.050 | 0.790 | 1.430 | 4.920 | 6.780 | 0.810 | 1.410 | 4.750 | 7.160 | 0.780 | 1.400 |
| 9 | 5.070 | 7.380 | 0.760 | 1.430 | 4.860 | 7.090 | 0.780 | 1.410 | 4.670 | 7.640 | 0.740 | 1.400 |
| 10 | 4.960 | 7.630 | 0.730 | 1.430 | 4.720 | 7.460 | 0.740 | 1.420 | 4.510 | 7.750 | 0.720 | 1.400 |
| 11 | 4.910 | 7.990 | 0.700 | 1.430 | 4.670 | 7.990 | 0.700 | 1.420 | 4.440 | 7.990 | 0.700 | 1.410 |
| 12 | 4.840 | 8.190 | 0.680 | 1.440 | 4.580 | 8.190 | 0.680 | 1.420 | 4.340 | 8.190 | 0.680 | 1.410 |
| 13 | 4.830 | 7.730 | 0.710 | 1.440 | 4.590 | 7.710 | 0.710 | 1.420 | 4.360 | 7.710 | 0.710 | 1.410 |
| 14 | 4.780 | 8.430 | 0.660 | 1.440 | 4.520 | 8.630 | 0.650 | 1.420 | 4.270 | 8.450 | 0.660 | 1.410 |
| 15 | 4.720 | 8.680 | 0.640 | 1.440 | 4.450 | 8.890 | 0.630 | 1.430 | 4.180 | 8.700 | 0.640 | 1.410 |
| 16 | 4.700 | 9.010 | 0.620 | 1.440 | 4.430 | 9.250 | 0.610 | 1.430 | 4.160 | 8.660 | 0.640 | 1.410 |
| 17 | 4.630 | 9.070 | 0.610 | 1.440 | 4.340 | 9.310 | 0.600 | 1.430 | 4.050 | 8.900 | 0.620 | 1.420 |
| 18 | 4.620 | 9.250 | 0.600 | 1.450 | 4.330 | 9.730 | 0.580 | 1.430 | 4.030 | 9.070 | 0.610 | 1.420 |
| 19 | 4.550 | 9.980 | 0.560 | 1.450 | 4.230 | 10.530 | 0.540 | 1.430 | 3.900 | 10.030 | 0.560 | 1.420 |
| 20 | 4.590 | 9.610 | 0.580 | 1.450 | 4.290 | 10.140 | 0.560 | 1.430 | 3.990 | 9.230 | 0.600 | 1.420 |
| T (min) | (M3, M4) | (M4, M5) | (M5, M6) | |||||||||
| 𝜇 | 𝜈 | 𝜀 | 𝜎 | 𝜇 | 𝜈 | 𝜀 | 𝜎 | 𝜇 | 𝜈 | 𝜀 | 𝜎 | |
| 1 | 5.930 | 3.050 | 1.570 | 1.370 | 6.170 | 3.920 | 1.340 | 1.380 | 6.600 | 3.500 | 1.460 | 1.350 |
| 2 | 5.650 | 3.990 | 1.270 | 1.380 | 5.750 | 4.900 | 1.110 | 1.390 | 5.970 | 4.480 | 1.190 | 1.370 |
| 3 | 5.480 | 4.640 | 1.120 | 1.380 | 5.490 | 5.490 | 1.000 | 1.390 | 5.610 | 5.020 | 1.070 | 1.380 |
| 4 | 5.380 | 5.200 | 1.020 | 1.390 | 5.330 | 5.960 | 0.930 | 1.400 | 5.380 | 5.470 | 0.990 | 1.380 |
| 5 | 5.220 | 5.750 | 0.940 | 1.390 | 5.190 | 6.320 | 0.880 | 1.400 | 5.190 | 5.960 | 0.920 | 1.390 |
| 6 | 5.110 | 6.300 | 0.870 | 1.400 | 5.060 | 6.720 | 0.830 | 1.410 | 5.010 | 6.530 | 0.850 | 1.390 |
| 7 | 5.030 | 6.620 | 0.830 | 1.400 | 4.950 | 6.960 | 0.800 | 1.410 | 4.880 | 6.750 | 0.820 | 1.390 |
| 8 | 4.990 | 7.160 | 0.780 | 1.400 | 4.890 | 7.410 | 0.760 | 1.410 | 4.770 | 7.150 | 0.780 | 1.400 |
| 9 | 4.940 | 7.500 | 0.750 | 1.400 | 4.830 | 7.620 | 0.740 | 1.410 | 4.700 | 7.640 | 0.740 | 1.400 |
| 10 | 4.810 | 7.750 | 0.720 | 1.410 | 4.690 | 7.890 | 0.710 | 1.420 | 4.550 | 7.750 | 0.720 | 1.400 |
| 11 | 4.780 | 8.320 | 0.680 | 1.410 | 4.640 | 8.140 | 0.690 | 1.420 | 4.460 | 8.300 | 0.680 | 1.410 |
| 12 | 4.700 | 8.360 | 0.670 | 1.410 | 4.560 | 8.350 | 0.670 | 1.420 | 4.370 | 8.530 | 0.660 | 1.410 |
| 13 | 4.690 | 8.030 | 0.690 | 1.410 | 4.560 | 7.860 | 0.700 | 1.420 | 4.390 | 8.200 | 0.680 | 1.410 |
| 14 | 4.650 | 8.810 | 0.640 | 1.410 | 4.500 | 8.620 | 0.650 | 1.420 | 4.300 | 8.610 | 0.650 | 1.410 |
| 15 | 4.580 | 8.880 | 0.630 | 1.420 | 4.430 | 8.890 | 0.630 | 1.420 | 4.210 | 8.870 | 0.630 | 1.410 |
| 16 | 4.580 | 9.460 | 0.600 | 1.420 | 4.420 | 8.680 | 0.640 | 1.420 | 4.170 | 9.010 | 0.620 | 1.410 |
| 17 | 4.490 | 9.520 | 0.590 | 1.420 | 4.310 | 9.100 | 0.610 | 1.430 | 4.070 | 9.280 | 0.600 | 1.420 |
| 18 | 4.500 | 9.950 | 0.570 | 1.420 | 4.310 | 9.520 | 0.590 | 1.430 | 4.040 | 9.680 | 0.580 | 1.420 |
| 19 | 4.410 | 10.520 | 0.540 | 1.420 | 4.220 | 9.820 | 0.570 | 1.430 | 3.930 | 10.220 | 0.550 | 1.420 |
| 20 | 4.470 | 10.120 | 0.560 | 1.420 | 4.290 | 9.260 | 0.600 | 1.430 | 4.010 | 9.860 | 0.570 | 1.420 |
𝜇: gamma, (𝜈,𝜀 ): generalized gamma, 𝜎: lognormal.
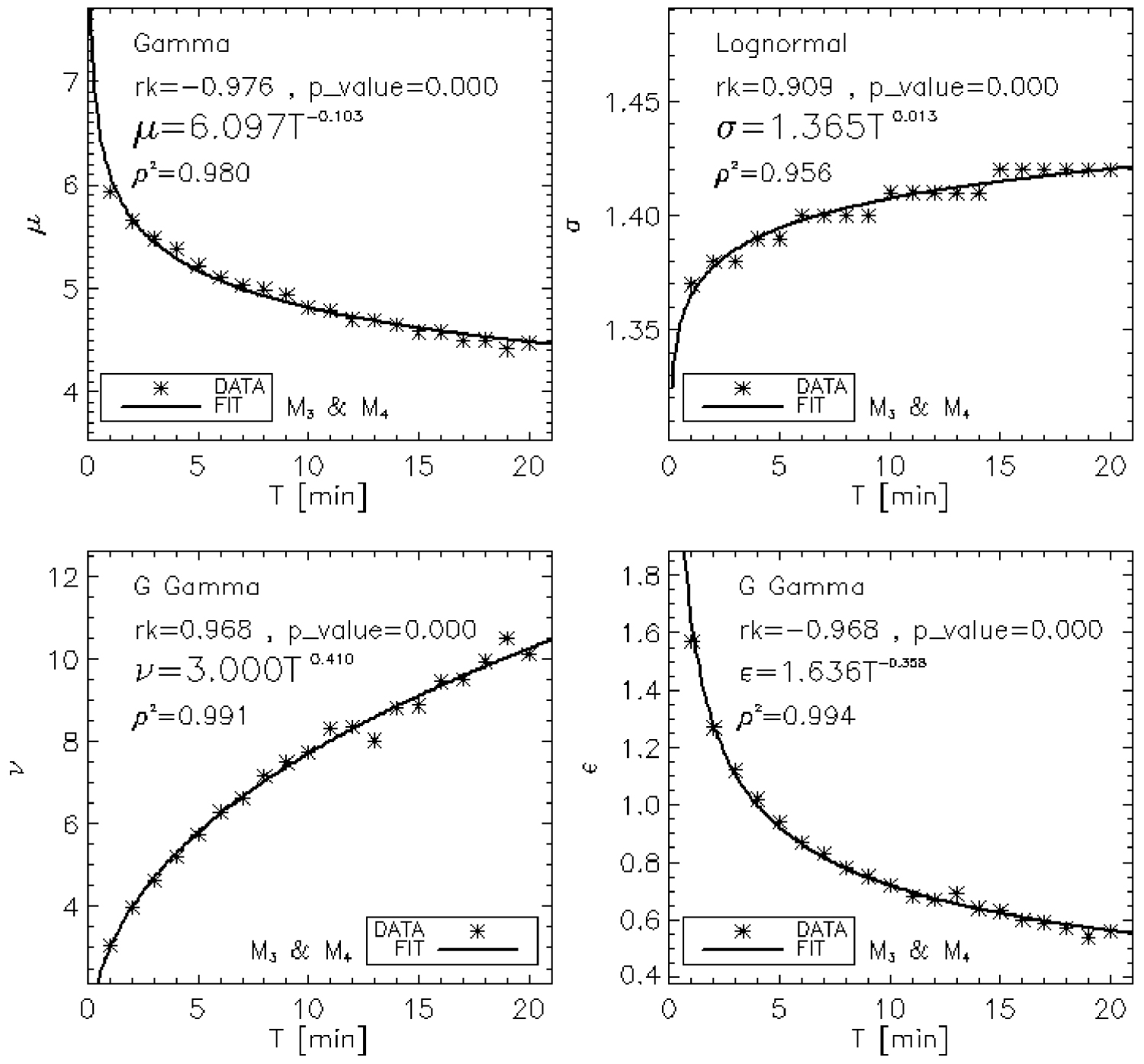
Link between shape function parameters and integration time step. rk is the Kendall rank correlation between sample and integration time step. p_value is the significance level of the correlation. It’s in the interval [0.0,1.0]; a small value indicates a significant correlation. Case of the couple of moments (M3, M4). 𝜌2 is the square of the linear Pearson correlation coefficient, between the sample and the model. Generalized gamma is noted G Gamma.
Relations between the shape function parameters and the integration time step (T (min))
| Gamma | Lognormal | |||||||
|---|---|---|---|---|---|---|---|---|
| Couples | rk | p_value | Relationship | 𝜌2 | rk | p_value | Relationship | 𝜌2 |
| (M0, M1) | −0.989 | 0.000 | 𝜇 = 6.180T−0.098 | 0.983 | 0.912 | 0.000 | 𝜎 = 1.396T0.012 | 0.936 |
| (M1, M2) | −0.979 | 0.000 | 𝜇 = 6.349T−0.129 | 0.987 | 0.909 | 0.000 | 𝜎 = 1.375T0.013 | 0.956 |
| (M2, M3) | −0.979 | 0.000 | 𝜇 = 6.714T−0.173 | 0.992 | 0.923 | 0.000 | 𝜎 = 1.356T0.015 | 0.966 |
| (M3, M4) | −0.976 | 0.000 | 𝜇 = 6.097T−0.103 | 0.980 | 0.909 | 0.000 | 𝜎 = 1.365T0.013 | 0.956 |
| (M4, M5) | −0.984 | 0.000 | 𝜇 = 6.313T−0.129 | 0.989 | 0.903 | 0.000 | 𝜎 = 1.376T0.012 | 0.953 |
| (M5, M6) | −0.979 | 0.000 | 𝜇 = 6.778T−0.175 | 0.992 | 0.923 | 0.000 | 𝜎 = 1.352T0.016 | 0.975 |
| Generalized gamma | ||||||||
| Couples | rk | p_value | Relationship | 𝜌2 | rk | p_value | Relationship | 𝜌2 |
| (M0, M1) | 0.968 | 0.000 | 𝜈 = 3.449T0.343 | 0.989 | −0.968 | 0.000 | 𝜀 = 1.527T−0.321 | 0.994 |
| (M1, M2) | 0.968 | 0.000 | 𝜈 = 2.640T0.450 | 0.990 | −0.968 | 0.000 | 𝜀 = 1.753T−0.377 | 0.994 |
| (M2, M3) | 0.947 | 0.000 | 𝜈 = 3.708T0.314 | 0.979 | −0.966 | 0.000 | 𝜀 = 1.427T−0.294 | 0.994 |
| (M3, M4) | 0.968 | 0.000 | 𝜈 = 3.000T0.410 | 0.991 | −0.968 | 0.000 | 𝜀 = 1.636T−0.358 | 0.994 |
| (M4, M5) | 0.937 | 0.000 | 𝜈 = 3.959T0.294 | 0.984 | −0.947 | 0.000 | 𝜀 = 1.359T−0.280 | 0.995 |
| (M5, M6) | 0.968 | 0.000 | 𝜈 = 3.447T0.353 | 0.991 | −0.976 | 0.000 | 𝜀 = 1.513T−0.325 | 0.994 |
They are established for the six couples of moments studied. rk is the Kendall rank correlation between sample and integration time step. p_value is the significance level of the correlation. It’s in the interval [0.0,1.0]; a small value indicates a significant correlation. 𝜌2 is the square of the linear Pearson correlation coefficient, between the sample and the model.
4.2. Discussion
In West Africa, gamma and lognormal DSD models are used more to adjust measured DSDs [Nzeukou et al. 2004, Ochou et al. 2007, Sauvageot and Lacaux 1995, Moumouni et al. 2008, 2021]. This study showed that these models are well adapted for the analyzed DSDs, but the generalized gamma DSD model is better because of its flexibility [Lee et al. 2004].
The choice of reference moments for DSD normalization must be made according to the applications. In this article, we have analyzed the case of consecutive moment order, because it allows us to simplify the equations. The expressions of the shape function or the constant Cn, established for the three DSD models used, will be used for any application requiring the use of consecutive moment order. For other combinations of moments, one can refer to Lee et al. [2004]. For retrieval of rain intensity from radar measurements, these authors suggest the combination of moments M6 (close to the reflectivity, variable measured by the radar) and Mi (i less than 6).
Weather radar measurements are usually based on a sequence of quasi-horizontal scans (PPIs, for Plan Position Indicators) each providing a quasi-instantaneous snapshot of the rain, with a typical sampling rate of 1 to 5 min. Depending on the overall scanning strategy, several subsequent PPIs may be used to provide a time averaged rainrate every 10 to 15 min. The parameters of the rainfall estimation algorithms or of DSD model are often derived from DSDs sampled at ground level, at 1 min time step. The results of this study can be used to transform these parameters to the time step most relevant for the application.
This article shows trends in the evolution of the shape parameters with respect to the DSD integration time step, in West Africa, as shown by Moumouni et al. [2021] with the single-moment normalization method. Unfortunately, to our knowledge, no reference relating to the study of the impact of the DSD integration time step on their double-moment normalization is available to make a comparison with. Meanwhile, it opens up other scientific questions: (i) do the trends in parameters values change from one climatic region to another? (ii) what is the physical significance of these changes? or more broadly, what is the cause of the variability of the shape parameters during the rainfall event? etc. All these important scientific questions for the modeling of the DSD, can be the subject of other works. The gamma, generalized gamma and lognormal models doesn’t have the same heavy tails [Halliwell 2013] as shown in Figure 2. For future work, we will consider this aspect, as well as the fitting of other models (Pareto and inverse gamma) by other methods [Halliwell 2013].
5. Concluding remark
Following the work of Moumouni et al. [2021] on the analysis of the impact of the integration time step on the single-moment normalization of the DSD, this study analyzes the impact of the integration time step on the double-moment normalization of the DSD. The method proposed by Lee et al. [2004] was used. It was applied to rain DSD data measured in northern Benin (West Africa) during AMMA intensive period experiment. DSD models gamma, generalized gamma, and lognormal are used for spectra fitting. The modeling was evaluated by comparing the estimated moments to the measured moments.
The study revealed, as in the case of single-moment normalization [Moumouni et al. 2021], a strong dependence of the shape function parameters on the integration time step. It also showed that the gamma and lognormal DSD models are well adapted to the data used, but the generalized gamma DSD model is recommended because the DSD moment estimation errors are reduced and independent of the integration time step.
Author contributions
Data curation, SM; Formal analysis, SM, FPA, E-PZ; Methodology, SM, FPA, E-PZ; Supervision, SM, AEL, MG; Writing—original draft, SM; Writing—review & editing, SM, AEL, MG.
Conflicts of interest
The authors declare no conflict of interest.
Funding
This research received no external funding.
Acknowledgments
Based on a French initiative, AMMA was built by an international scientific group and is currently funded by a large number of agencies, especially from France, UK, US and Africa. It has been the beneficiary of a major financial contribution from the European Community’s Sixth Framework Research Program. Detailed information on scientific coordination and funding is available on the AMMA International web site http://www.amma-international.org.