

1 Introduction
The basic subdivision of fishing zones of a coastal state consists on the artisan fishery which operates on 3 miles from the coast, the coastal fishery between 3 and 12 miles and the high sea fishery beyond 12 miles (see [8,20,21]). The adjacent coastal state who is the owner of the resource evolving in his Exclusive Economical Zone, is responsible for the management of the global fishery which is shared by the above mentioned different types of fisheries. So, in order to control the situation, it is important to have a good knowledge of the global evolution of the resource and of the activity related to its exploitation. The fishery management authorities must deal with the possible fishery conflicts resulting, for instance, from the simultaneous exploitation of two fishing zones (we quote, for example, the case of the North American Pacific Salmon [11,13]). Theoretically, each kind of fleet operates in its zone according to its own fishery characteristics. In practice, the fish stock does not remain in a given area and frequently moves between two adjacent zones. Consequently, the fishing vessels do not hesitate to cross the fuzzy boundary between two adjacent zones in order to increase their catch.
In Mchich et al. [9], we built a management bioeconomical model of a fishery, exploited on two fishing zones by two fleets of different characteristics, with constant fishing efforts displacement rates. The model analysis leads to the determination of conditions for the durability of the fishing activity. Then, in Mchich et al. [10], we generalized this work [9] to a model with stock-dependent fishing efforts displacement rates. The analysis of this second model showed the possibility of a limit cycle.
From the point of view of a sustainable fishery, it is better to avoid important variations of the total fish stock and fishing effort, because large periods of time with small stocks and small fishing efforts is not of any social or economic interest. Moreover, if the total stock density becomes too small for some period, then environmental fluctuations could lead to the extinction of the stock. This critical situation has been avoided by introducing a control parameter, in the catchability terms of the model. This made possible to lead the system to a stable equilibrium.
However, it is more realistic to introduce a control function depending on time, rather than a control parameter. This is the aim of this work, where we introduce a time dependent control function, in equations describing the fishing efforts variation. This control is regarded as an investment proportion of the fishing income for each fleet.
We first consider a simplest model with constant rates for the displacement of fleets, to show how we can construct a Lyapunov function, a discontinuous feedback and to prove the stabilizability of the system. Next, we consider the model studied in Mchich et al. [10], where the displacement rates of the fishing effort are stock-dependent, and we introduce a control function to show how to avoid the case of a limit cycle and to stabilize the system in this case.
In the next section, we describe the first model which consists in a system of four ordinary differential equations, governing the two local fish stocks and the two fishing efforts on each fishing area. The model includes two time scales, a fast one associated to quick movements between the fishing zones in comparison to a slow one corresponding to the growth of the fish population and the variation of the total number of vessels involved in the fishery. We take advantage of the two time scales to build a reduced 2D reduced model, called the aggregated model. It describes the dynamics of total fish stocks and total fishing efforts, at the slow time scale t. For this, we use the aggregation method of variables (see [2,3,12,15]) which is based on perturbation technics and on the application of an adequate version of the Center Manifold Theorem [7].
Thus, in Section 3, we present the aggregated system and equilibrium points. The analysis of the stabilizability of this model, by the construction of a Lyapunov function (see [16]) and a feedback, is given in Section 4. We also describe an equilibrium strategy in finite time; and an extension of our results in the case where we consider a negative investment. In this last case, we provide bioeconomical interpretations.
In Section 5, we analyze the more realistic model where the fleets displacement rates are fish stock-dependent. We showed in Mchich et al. [10] that if there is no control in the studied model, and under some conditions, the dynamics can lead to a stable limit cycle. So, we introduce a control function (as an investment proportion) in order to avoid this limit cycle and to stabilize the system. We show that in this case, any solution of the aggregated system can lead to the desired stable equilibrium point.
2 Mathematical model
We consider a model which describes the dynamics of two fish populations of densities
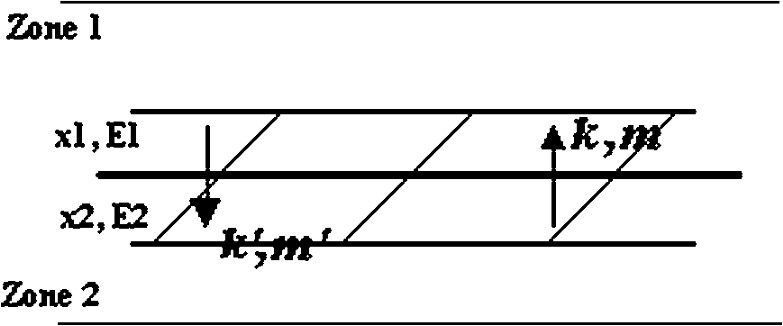
Illustration of two adjacent fishing zones with a small width in the sea.
We suppose that two processes occur at two different time scales. At the fast time scale, the total stock and the total fishing effort are constant. Thus, the fast part of the model only describes the displacement of fish and vessels between the two zones.
At the slow time scale, the total fish stock and the total fishing effort are not constant. Regarding fish stocks, their evolution, in each specific zone, is represented by the stock-effort Schäefer model, also called Graham–Schäefer model (see Schäefer [17]): the growth of the fish population according to the logistic model and its decrease due to the harvested quantity
Concerning the fishing effort, it is assumed to vary with respect to the investment proportion of the fishing revenue. That means that the fleet owners will invest (or not), with respect to their revenues. Note that the revenue, in the model, is the difference between the income and the cost
We assume that unit prices and unit costs are constant. This is a simplifying assumption as prices could, for example, depend on the abundance of fish available on the market at time t, see Allen and McGlade [1] and Clark [4]. We would like to investigate this process in a future contribution.
According to previous assumptions, the complete system, at the fast time scale τ with respect to t (see Mchich et al. [9,10]), reads as follows:
| (2.1) |
The catchability coefficient of the fleet on zone i
Parameters
The function
We can finally assume that
3 Aggregated system and equilibrium points
A simple calculation leads to the following fast equilibria:
| (3.1) |
| (3.2) |
Now, coming back to the complete initial system (2.1), we substitute the fast equilibria (3.1) and add the two fish stock and the two fishing effort equations. As
| (3.3) |
The system (3.3) has 3 equilibrium points:
| (3.4) |
These points permit us to subdivide the
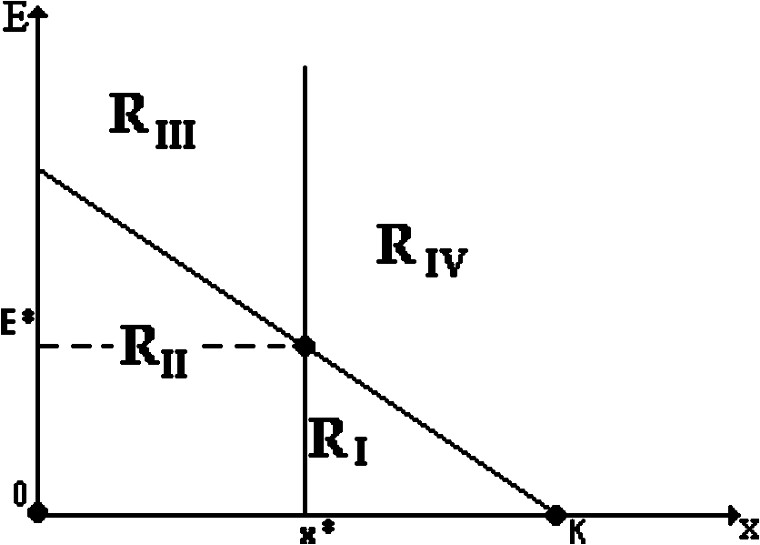
Illustration of nullclines and equilibrium points.
Note that the interesting equilibrium point is
Note also that the aggregated system (3.3) contains a control function
4 Main results of stabilizability
4.1 Stabilizability
In order to prove that a system:
| (4.1) |
This is a sufficient but not a necessary condition. For more details about the stabilizability concept, see, for example, the works of Clarke [6] and Rifford [16].
Now, we state the following result:
Theorem 4.1
The function
| (4.2) |
Moreover, the feedback
| (4.3) |
Proof
Let us consider the function given by (4.2):
This function is a
Furthermore, the function
- •
In the area
Indeed, - •
In the area
Indeed,
whereSo
- •
In the area
Indeed: - •
In the area
Indeed:
where
So
Remark 4.1 (The trajectory behavior when reaching the nullclines)
Let us consider a trajectory starting at an initial point
Now, we state the following theorem, which ensures the stabilizability of the system (3.3), with the discontinuous feedback
Theorem 4.2
For the Lyapunov function
Proof
In order to demonstrate this theorem, we first give some notations, to translate the equilibrium point
Thus, the problem (3.3) is reduced to the following one:
| (4.4) |
On the other hand, let us consider the following Lyapunov function associated to the problem (4.4):
Now, let
Thus, we must prove that the local solution of the system (4.4) is bounded. Indeed, since
The set
Now, we must prove that the solution
Lemma 4.3
Proof
Let us assume that
Let us consider the function
| (4.5) |
As the function
In other words, the solution of the system (4.5), at a given time, enters and remains in the whole set
Then
Which is absurd. Thus
So, we finish the proof of the theorem, since
4.2 Finite time strategy
The feedback defined in the preceding section stabilizes the system in infinite time. But it is more practical and realistic, for the coastal state and the fleets owners, to describe a strategy which will accelerate the procedure of convergence of the system towards a small neighborhood of the equilibrium point, in a finite time (see Fig. 3).
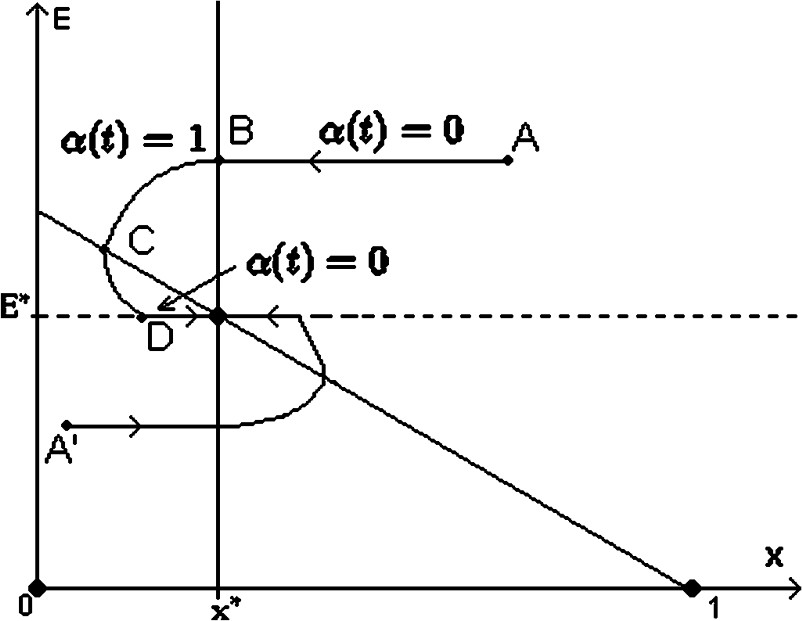
A finite time equilibrium strategy. Data have been chosen (in the case of the trajectory
Thus, let us consider a trajectory starting at an initial point A located in the area
One can also start from an initial point
4.3 Extension of the results
In order to avoid any overexploitation of the fishery, we think that it will be better for a coastal state to intervene directly in the fishing activity, by imposing a reduction or an increase in the fishing efforts.
This can be done by considering, in systems (2.1) and (3.3), the investment proportion
Thus, concerning the evolution of fishing efforts at the slow time, they increase or decrease with respect to the investment rate of the fishing revenue, if the revenue of the fishery and the investment rate are positive or negative. That means that the fleet owners are obliged to invest or disinvest, with respect to their incomes, a part of their revenue to increase or reduce their fishing efforts (number of boats, efficiency, ...).
From a mathematical point of view, the results already obtained in the preceding sections remain valid, one could even find another feedback (for the stabilizability) which is negative in some areas. We think that this can also be interesting in the case of the study of the feedback optimality, or in the case where a coastal state has to manage between a national and a foreign fleets. We hope to investigate this way in forthcoming works.
We state a result for a negative feedback:
Theorem 4.4
The function
| (4.6) |
Moreover, the feedback
| (4.7) |
Remark 4.2
Similarly to some analysis concerning a negative control given by Clark [4] and Clark et al. [5], we analyze the results of our model with negative control. We notice that a problem can occur in the case where
However, we suggest in this case two different interpretations. The first one is that the control can be regarded as a subsidy from the coastal state to the fleets owners, in order to increase their fishing efforts. The second one is that one could see in the investment withdrawal a reduction of the number of boats, which will act positively on their efficiency, and in this case, we can interpret the fishing efforts as the efficiency of the fishing boats. Note that the fishing effort of a fleet can even be interpreted as the number of boats, days of fishing, boats efficiency... (for this, one can refer to the web-site of the FAO organization [19]).
Proof of Theorem 4.1
In areas
- •
In the area
Indeed,
whereSo
- •
In the area
Indeed:
whereFinally, for the global asymptotical stability, the proof remains the same as the one of Theorem 4.2. □
Remark 4.3
For the finite time strategy, we can describe it as follows (see Fig. 4).
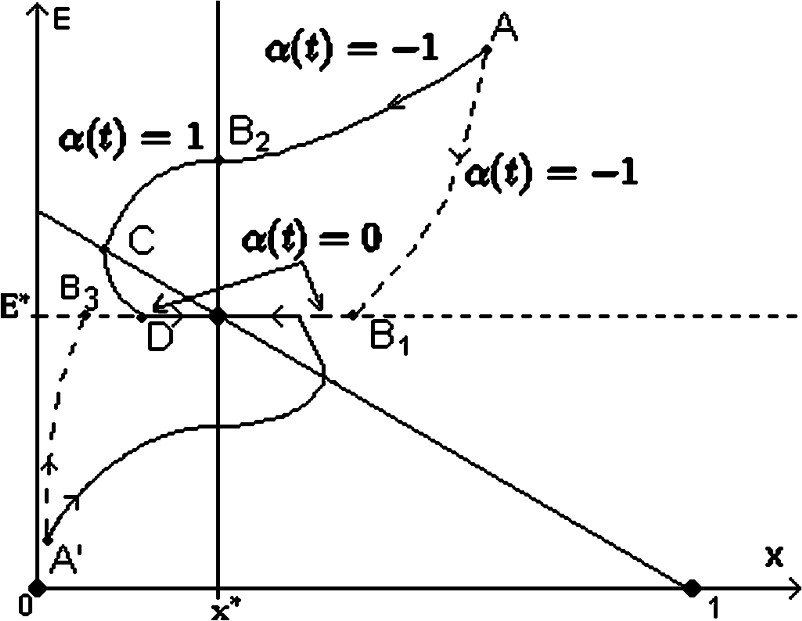
A finite time equilibrium strategy. Data have been chosen (in the case of the trajectory
Thus, let us consider a trajectory starting at an initial point A located in the area
- (1)
The trajectory decreases until reaching the line
- (2)
The trajectory decreases until reaching the nullcline
One can also start from an initial point
5 Stabilizability in the case of fish stock-dependent migration rates
In Mchich et al. [10], we built and studied a model which exhibits, under some conditions, a stable limit cycle. The complete system read as follows:
| (5.1) |
We had taken the migrations rates as:
| (5.2) |
| (5.3) |
| (5.4) |
| (5.5) |
We showed that the aggregated system (5.2) has 3 equilibrium points:
By setting
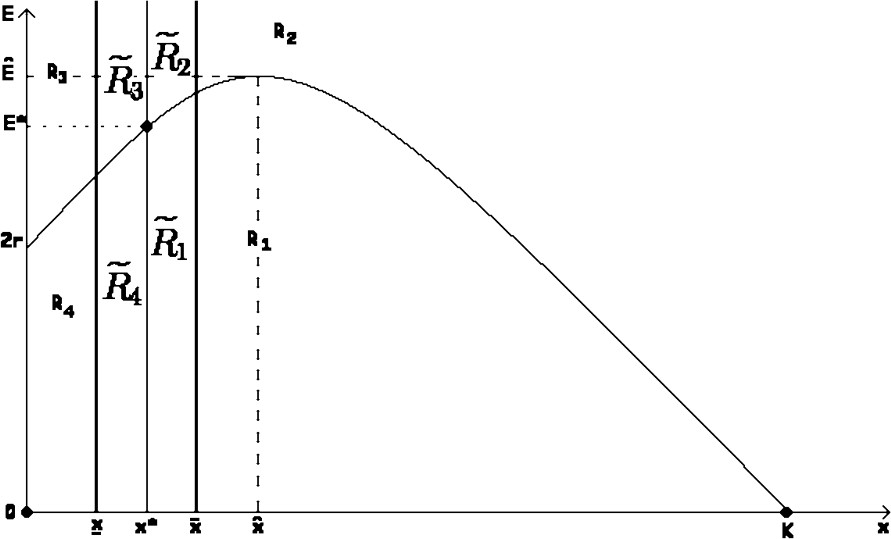
Illustration of nullclines and equilibrium points.
We introduced a control parameter as a term of catchability to avoid this case and to lead the system to the desired stable equilibrium point
| (5.6) |
As in preceding sections, the control function
| (5.7) |
This system has also 3 equilibrium points:
Note that if
On the other hand, if
In the two cases, we have:
Now, we state a theorem for the stabilizability of the aggregated system (5.7):
Theorem 5.1
The function
| (5.8) |
Moreover, the feedback
| (5.9) |
Proof
Let us consider the function given by (5.8):
This function is a
Furthermore, the function
- •
In the area
Indeed,
because - •
In the area
Indeed,
whereSo
- •
In the area
Indeed:because
- •
In the area
Indeed:
whereSo
- •
As the areas
Finally, for the global asymptotical stability of the aggregated system (5.7) near the equilibrium point
6 Conclusion
In this paper, we generalized our previous works (Mchich et al. [9,10]), where we studied the stability of some bioeconomical models. In some cases, we found the existence of a stable limit cycle. This is a critical situation, as it does not permit a satisfied durability of the fishing activity. Indeed, large periods (of time) with small fish stocks and external fluctuations could lead to the extinction of the fish stock.
In order to avoid such situations, in this work, we introduce a control function depending on time, which is considered as an investment proportion of the fishing revenue, into the fishing efforts equations. We construct Lyapunov functions and feedbacks to show that any solution of the aggregated systems, converges in an uniform way, towards the desired equilibrium point. This means that we can find a feedback, which allows us to avoid the undesired cases.
An important limitation of our models comes from the fact that we consider only two fishing zones. The application of our results would be more interesting in the case of N fishing zones (
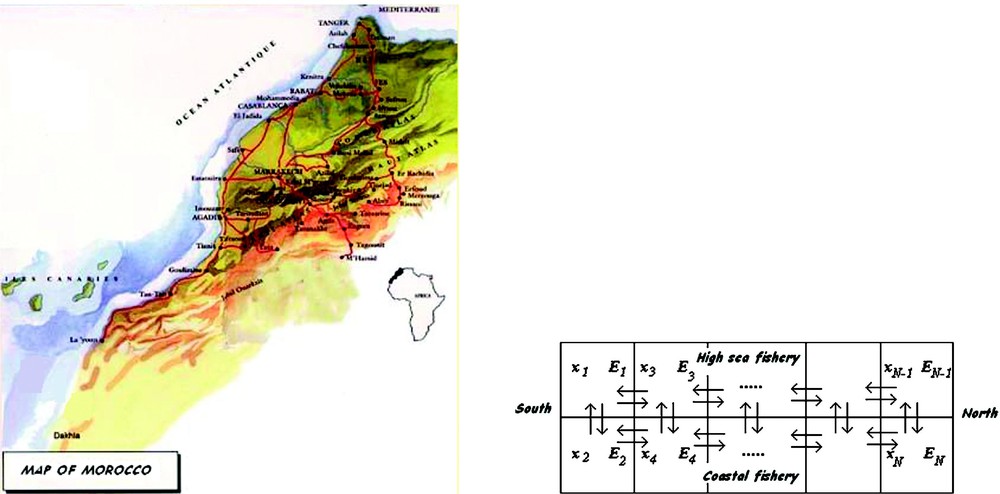
The first figure represents the map of Morocco and the second one illustrates a subdivision of a fishery into N zones.
Another situation worth to be considered is that of different control functions for each fishing fleet. This would permit, for example, in the case of national and foreign fleets, to have different controls for each fleet.
Economically, we think that the model would be more interesting if we would consider a fishery management problem. It would consist on maximizing the fishing revenue, with a spatial distribution of the state variables (fish stocks and fishing efforts) according to adequate boundary conditions. One can see for example the model used by Neubert in [14].
The variety of the control choice would permit to take into account some economical and social problems of the management of various fisheries. The results obtained could be used as a platform for the elaboration of a plan for the management of different kinds of fisheries, particularly, the repartition between the coastal and the high sea fisheries.
Acknowledgments
We thank the anonymous referee for the valuable comments that allowed us to improve the manuscript.
Vous devez vous connecter pour continuer.
S'authentifier